.jpg)
.jpg)
.jpg)
.jpg)
Nema 11 (28mm) ဟိုက်ဘရစ် စတက်ပါ မော်တာ၊ နှစ်ပိုင်းပါ မော်တာ၊ 4-ခဲ၊ ACME ခဲဝက်အူ၊ ဆူညံသံနည်း၊ သက်တမ်းရှည်၊ မြင့်မားသော စွမ်းဆောင်ရည်။
Nema 11 (28mm) ဟိုက်ဘရစ် စတက်ပါ မော်တာ၊ နှစ်ပိုင်းပါ မော်တာ၊ 4-ခဲ၊ ACME ခဲဝက်အူ၊ ဆူညံသံနည်း၊ သက်တမ်းရှည်၊ မြင့်မားသော စွမ်းဆောင်ရည်။
ဤ ၂၈ မီလီမီတာ hybrid stepper မော်တာကို အမျိုးအစားသုံးမျိုးဖြင့် ရရှိနိုင်ပါသည်- externally driven, through-axis နှင့် through-fixed-axis တို့ဖြစ်သည်။ သင်၏ လိုအပ်ချက်များအလိုက် ရွေးချယ်နိုင်ပါသည်။
အများဆုံးတွန်းကန်အား ၂၄၀ ကီလိုဂရမ်အထိ၊ အပူချိန်မြင့်တက်မှုနည်းခြင်း၊ တုန်ခါမှုနည်းခြင်း၊ ဆူညံသံနည်းခြင်း၊ သက်တမ်းရှည်ခြင်း (စက်ဝန်း ၅ သန်းအထိ) နှင့် မြင့်မားသောနေရာချထားမှုတိကျမှု (±၀.၀၁ မီလီမီတာအထိ)
VSM28HSM စံ ပြင်ပ မော်တာ မျဉ်းကြောင်းပုံ-
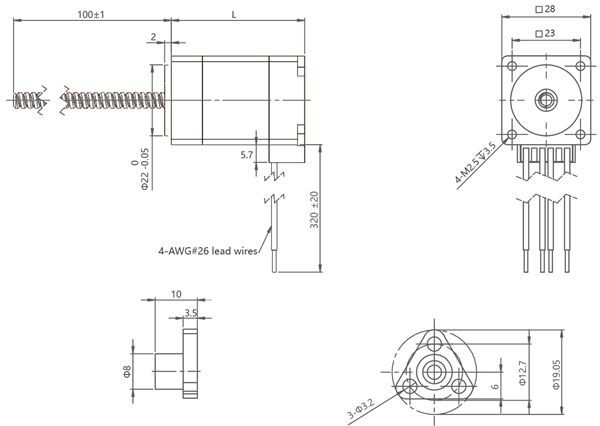
မှတ်စုများ-
ခဲကြိုးအရှည်ကို စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်
စိတ်ကြိုက်ပြုပြင်ခြင်းသည် ခဲဝက်အူ၏အဆုံးတွင် လက်တွေ့ကျပါသည်။
ဖော်ပြချက်များ
| ထုတ်ကုန်အမည် | ပြင်ပမှမောင်းနှင်သော 20mm hybrid stepper မော်တာများ |
| မော်ဒယ် | VSM20HSM |
| အမျိုးအစား | ဟိုက်ဘရစ်စတက်ပါမော်တာများ |
| ခြေလှမ်းထောင့် | ၁.၈° |
| ဗို့အား (V) | ၂.၅ / ၆.၃ |
| လျှပ်စီးကြောင်း (A) | ၀.၅ |
| ခုခံမှု (Ohms) | ၅.၁ / ၁၂.၅ |
| လျှပ်ကူးနိုင်စွမ်း (mH) | ၁.၅ / ၄.၅ |
| ခဲဝါယာကြိုးများ | 4 |
| ထိန်းထားနိုင်သော torque (Nm) | ၀.၀၂ / ၀.၀၄ |
| မော်တာအရှည် (မီလီမီတာ) | ၃၀ / ၄၂ |
| ပတ်ဝန်းကျင်အပူချိန် | -၂၀ ℃ ~ +၅၀ ℃ |
| အပူချိန်မြင့်တက်ခြင်း | အများဆုံး ၈၀,၀၀၀။ |
| ဒိုင်အီလက်ထရစ်အစွမ်းသတ္တိ | 1mA အများဆုံး။ 500V၊ 1KHz၊ 1Sec။ |
| လျှပ်ကာခုခံမှု | 100MΩ အနည်းဆုံး။ @500Vdc |
အသိအမှတ်ပြုလက်မှတ်များ

လျှပ်စစ်ကန့်သတ်ချက်များ:
| မော်တာအရွယ်အစား | ဓာတ်အား/ အဆင့် (V) | လက်ရှိ/ အဆင့် (က) | ခုခံမှု/ အဆင့် (Ω) | လျှပ်ကူးနိုင်စွမ်း/ အဆင့် (mH) | အရေအတွက် ခဲဝါယာကြိုးများ | ရိုတာ အရှိန်အဟုန် (ဂရမ်.စင်တီမီတာ2) | လိမ်အားကို ထိန်းထားခြင်း (နမီတာ) | မော်တာအရှည် L (မီလီမီတာ) |
| 20 | ၂.၅ | ၀.၅ | ၅.၁ | ၁.၅ | 4 | 2 | ၀.၀၂ | 30 |
| 20 | ၆.၃ | ၀.၅ | ၁၂.၅ | ၄.၅ | 4 | 3 | ၀.၀၄ | 42 |
အထွေထွေနည်းပညာဆိုင်ရာ parameters များ:
| ရေဒီယယ် ကင်းစင်မှု | အများဆုံး ၀.၀၂ မီလီမီတာ (၄၅၀ ဂရမ် ဝန်) | လျှပ်ကာခုခံမှု | 500VDC @100MΩ |
| ဝင်ရိုး ရှင်းလင်းရေး | အများဆုံး ၀.၀၈ မီလီမီတာ (၄၅၀ ဂရမ် ဝန်) | ဒိုင်အီလက်ထရစ်အစွမ်းသတ္တိ | ၅၀၀ ဗို့အား၊ ၁ အမ်အေ၊ ၁ စက္ကန့် @ ၁ ကီလိုဟတ်ဇ် |
| အများဆုံး ရေဒီယယ် ဝန် | 15N (အနားကွပ်မျက်နှာပြင်မှ 20 မီလီမီတာ) | လျှပ်ကာအတန်းအစား | အမျိုးအစား B (၈၀,၀၀၀) |
| အများဆုံး ဝင်ရိုးဝန် | 5N | ပတ်ဝန်းကျင်အပူချိန် | -၂၀ ℃ ~ +၅၀ ℃ |
ဝက်အူ သတ်မှတ်ချက်များ-
| ခဲဝက်အူ အချင်း (မီလီမီတာ) | ခဲ (မီလီမီတာ) | ခြေလှမ်း (မီလီမီတာ) | အလိုအလျောက် လော့ချသည့် အား (N) ပါဝါပိတ်ခြင်း |
| ၃.၅ | ၀.၆၀၉၆ | ၀.၀၀၃၀၄၈ | 80 |
| ၃.၅ | 1 | ၀.၀၀၅ | 40 |
| ၃.၅ | 2 | ၀.၀၁ | 10 |
| ၃.၅ | 4 | ၀.၀၂ | 1 |
| ၃.၅ | 8 | ၀.၀၄ | 0 |
Torque-frequency curve
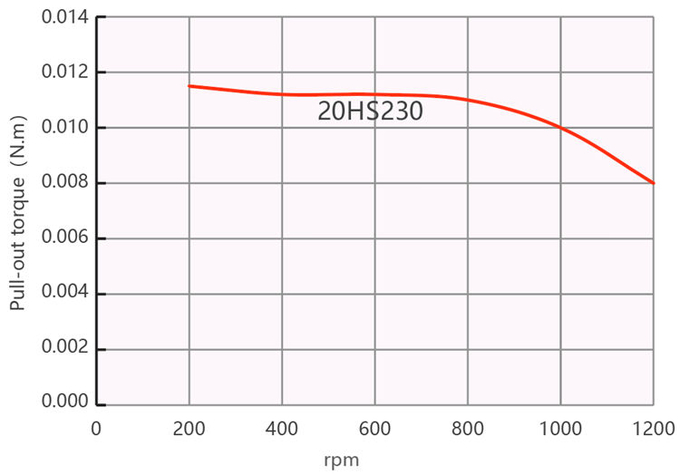
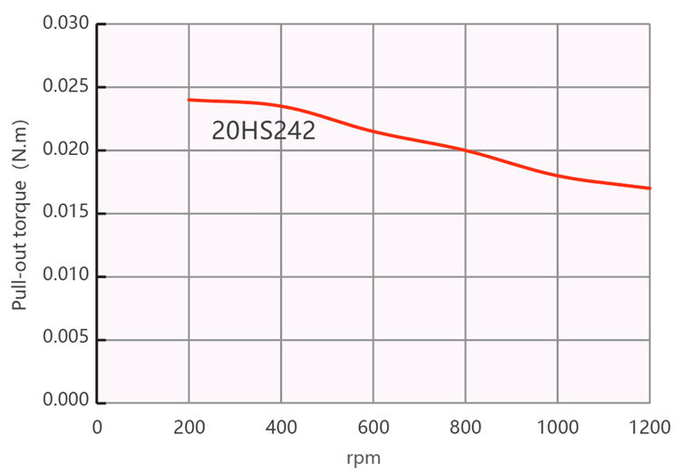
စမ်းသပ်အခြေအနေ:
ချော့ပါ မောင်းနှင်မှု၊ တစ်ဝက် မိုက်ခရို-စတက်ပ်၊ မောင်းနှင်ဗို့အား 24V
အသုံးချနယ်ပယ်များ
3D ပုံနှိပ်ခြင်း:3D ပရင်တာများတွင် ပရင့်ခေါင်း၊ စင်မြင့်နှင့် ဝင်ရိုးရွေ့လျားမှုစနစ်ကို မောင်းနှင်ရန်အတွက် 20mm hybrid stepper မော်တာများကို အသုံးပြုနိုင်သည်။
အလိုအလျောက် စက်ပစ္စည်းများ- ဤ stepper မော်တာများကို အလိုအလျောက်ထုပ်ပိုးစက်များ၊ အလိုအလျောက် တပ်ဆင်ရေးလိုင်းများ၊ အလိုအလျောက် ကိုင်တွယ်သည့် စက်ရုပ်လက်များ စသည်တို့ကဲ့သို့သော အလိုအလျောက် စက်ပစ္စည်းများတွင် တိကျသော အနေအထားနှင့် အမြန်နှုန်းကို ထိန်းချုပ်ရန်အတွက် အသုံးများသည်။
ရိုဘော့တစ်ပညာ-ရိုဘော့တစ်နယ်ပယ်တွင်၊ 20 မီလီမီတာ ဟိုက်ဘရစ် စတက်ပါ မော်တာများကို တိကျသော သဘောထားနှင့် အနေအထား ထိန်းချုပ်မှုအတွက် ရိုဘော့များ၏ အဆစ်လှုပ်ရှားမှုများကို ထိန်းချုပ်ရန် အသုံးပြုသည်။
CNC စက်ကိရိယာများ:ဤ stepper မော်တာများကို CNC စက်ကိရိယာများတွင်လည်း တိကျမှုမြင့်မားသော စက်ယန္တရားများအတွက် ကိရိယာများ သို့မဟုတ် စားပွဲများ၏ တိကျသော ရွေ့လျားမှုများကို မောင်းနှင်ရန် အသုံးပြုပါသည်။
ဆေးဘက်ဆိုင်ရာပစ္စည်းကိရိယာများ-ဆေးဘက်ဆိုင်ရာပစ္စည်းကိရိယာများတွင်၊ ခွဲစိတ်ကုသမှုစက်ရုပ်များနှင့် ဆေးဝါးပို့ဆောင်ရေးစနစ်များကဲ့သို့သော ဆေးဘက်ဆိုင်ရာပစ္စည်းကိရိယာများရှိ အစိတ်အပိုင်းများ၏ ရွေ့လျားမှုကို တိကျစွာထိန်းချုပ်ရန် 20mm hybrid stepper မော်တာများကို အသုံးပြုနိုင်သည်။
မော်တော်ကားပစ္စည်းကိရိယာများ-မော်တော်ကားလုပ်ငန်းတွင် ဤ stepper မော်တာများကို ပြတင်းပေါက် မြှင့်တင်ခြင်းနှင့် နှိမ့်ချခြင်းစနစ်များ၊ ထိုင်ခုံချိန်ညှိမှုစနစ်များ စသည်တို့ကဲ့သို့သော မော်တော်ကားအစိတ်အပိုင်းများ၏ အနေအထားနှင့် ရွေ့လျားမှုကို ထိန်းချုပ်ရန် အသုံးပြုနိုင်သည်။
စမတ်အိမ်-စမတ်အိမ်သုံး နယ်ပယ်တွင် 20mm hybrid stepper မော်တာများကို ကုလားကာများ ဖွင့်ပိတ်ခြင်း၊ အိမ်လုံခြုံရေးစနစ်များတွင် လည်ပတ်နေသော ကင်မရာများ စသည်တို့ကို ထိန်းချုပ်ရန် အသုံးပြုနိုင်ပါသည်။
၎င်းတို့သည် 20mm hybrid stepper မော်တာများ၏ အသုံးများသော အသုံးချမှုနယ်ပယ်အချို့သာဖြစ်ပြီး၊ အမှန်တကယ်တွင်၊ stepper မော်တာများသည် မတူညီသော စက်မှုလုပ်ငန်းများနှင့် နယ်ပယ်များတွင် ကျယ်ပြန့်သော အသုံးချမှုများရှိသည်။ အသုံးပြုမှုဆိုင်ရာ အခြေအနေများသည် ၎င်းတို့၏ သီးခြားသတ်မှတ်ချက်များ၊ စွမ်းဆောင်ရည်နှင့် ထိန်းချုပ်မှုလိုအပ်ချက်များပေါ်တွင်လည်း မူတည်ပါသည်။
အားသာချက်
တိကျမှုနှင့် နေရာချထားမှုစွမ်းရည်-Hybrid stepper မော်တာများသည် 1.8 ဒီဂရီ သို့မဟုတ် 0.9 ဒီဂရီကဲ့သို့သော ခြေလှမ်းထောင့်နိမ့်များဖြင့် ကောင်းမွန်သော ခြေလှမ်းလှုပ်ရှားမှုများအတွက် မြင့်မားသော တိကျမှုနှင့် နေရာချထားနိုင်စွမ်းကို ပေးစွမ်းပြီး ပိုမိုတိကျသော အနေအထားထိန်းချုပ်မှုကို ရရှိစေသည်။
မြင့်မားသော torque နှင့် မြင့်မားသော မြန်နှုန်း:Hybrid stepper မော်တာများကို မြင့်မားသော torque output နှင့် မှန်ကန်သော driver နှင့် controller ဖြင့် မြင့်မားသော မြန်နှုန်းကို ပေးစွမ်းနိုင်ရန် ဖွဲ့စည်းတည်ဆောက်ပုံအရ ဒီဇိုင်းထုတ်ထားပါသည်။ ၎င်းသည် ၎င်းတို့ကို မြင့်မားသော torque နှင့် မြင့်မားသော မြန်နှုန်းရွေ့လျားမှု နှစ်မျိုးလုံး လိုအပ်သော အသုံးချမှုများအတွက် သင့်လျော်စေသည်။
ထိန်းချုပ်နိုင်စွမ်းနှင့် ပရိုဂရမ်ရေးသားနိုင်စွမ်း-Hybrid stepper မော်တာများသည် ထိန်းချုပ်နိုင်စွမ်းကောင်းမွန်သည့် open-loop ထိန်းချုပ်မှုစနစ်တစ်ခုဖြစ်သည်။ ၎င်းတို့ကို ထိန်းချုပ်ကိရိယာဖြင့် ရွေ့လျားမှုအဆင့်တိုင်းတွင် တိကျစွာထိန်းချုပ်နိုင်သောကြောင့် ပရိုဂရမ်ရေးသားနိုင်ပြီး ထိန်းချုပ်နိုင်သော ရွေ့လျားမှုအစီအစဥ်များကို ဖြစ်ပေါ်စေသည်။
ရိုးရှင်းသော Drive နှင့် Control:Hybrid stepper မော်တာများတွင် အခြားမော်တာအမျိုးအစားများနှင့် နှိုင်းယှဉ်ပါက ရိုးရှင်းသော drive နှင့် control circuitry များရှိသည်။ ၎င်းတို့သည် position feedback devices (ဥပမာ encoder) များကို အသုံးပြုရန် မလိုအပ်ဘဲ သင့်လျော်သော drivers များနှင့် controllers များဖြင့် တိုက်ရိုက်ထိန်းချုပ်နိုင်သည်။ ၎င်းသည် system design နှင့် installation ကို ရိုးရှင်းစေပြီး ကုန်ကျစရိတ်များကို လျှော့ချပေးသည်။
မြင့်မားသောယုံကြည်စိတ်ချရမှုနှင့်တည်ငြိမ်မှု:Hybrid stepper မော်တာများသည် ၎င်းတို့၏ ရိုးရှင်းသောတည်ဆောက်ပုံ၊ ရွေ့လျားနေသော အစိတ်အပိုင်းအရေအတွက်နည်းပါးခြင်းနှင့် brushless ဒီဇိုင်းကြောင့် မြင့်မားသောယုံကြည်စိတ်ချရမှုနှင့် တည်ငြိမ်မှုကို ပေးစွမ်းသည်။ ၎င်းတို့သည် ပုံမှန်ပြုပြင်ထိန်းသိမ်းမှုမလိုအပ်ဘဲ၊ ဝန်ဆောင်မှုသက်တမ်းရှည်ကြာပြီး သင့်လျော်သောအသုံးပြုမှုနှင့် လည်ပတ်မှုဖြင့် တည်ငြိမ်သောစွမ်းဆောင်ရည်ကို ပေးစွမ်းသည်။
စွမ်းအင်ချွေတာပြီး ဆူညံသံနည်းပါးခြင်း-Hybrid stepper မော်တာများသည် စွမ်းအင်ချွေတာပြီး ပါဝါနည်းပါးချိန်တွင် မြင့်မားသော output torque ကို ပေးစွမ်းသည်။ ထို့အပြင်၊ ၎င်းတို့သည် ဆူညံသံအဆင့်ကို နိမ့်ကျစေရန် ပုံမှန်လည်ပတ်လေ့ရှိပြီး ဆူညံသံအာရုံခံနိုင်သော အသုံးချမှုများတွင် အားသာချက်ရရှိစေသည်။
မော်တာရွေးချယ်မှုလိုအပ်ချက်များ-
►ရွေ့လျားမှု/တပ်ဆင်မှု ဦးတည်ချက်
► ဝန်အားလိုအပ်ချက်များ
►လေဖြတ်ခြင်းလိုအပ်ချက်များ
► စက်ပြင်ခြင်းလိုအပ်ချက်များ
►တိကျမှုလိုအပ်ချက်များ
►အန်ကုဒ်ဒါတုံ့ပြန်ချက်လိုအပ်ချက်များ
►လက်စွဲချိန်ညှိမှုလိုအပ်ချက်များ
►ပတ်ဝန်းကျင်ဆိုင်ရာလိုအပ်ချက်များ
ထုတ်လုပ်မှုအလုပ်ရုံ



သင့်မက်ဆေ့ချ်ကို ကျွန်ုပ်တို့ထံ ပေးပို့ပါ-
ထုတ်ကုန် အမျိုးအစားများ
-
-300x300.jpg)
Nema 34 (86mm) ဟိုက်ဘရစ် စတက်ပါ မော်တာ၊ နှစ်ပိုင်း၊ 4...
-
-300x300.jpg)
Nema 23 (57mm) ဟိုက်ဘရစ် စတက်ပါ မော်တာ၊ နှစ်ပိုင်းပါ မော်တာ၊ 4...
-
-300x300.jpg)
Nema 8 (20mm) ဟိုက်ဘရစ် စတက်ပါ မော်တာ၊ နှစ်ပိုင်း၊ 4-...
-
-300x300.jpg)
Nema 17 (42mm) ဟိုက်ဘရစ် စတက်ပါ မော်တာ၊ နှစ်ပိုင်းပါ မော်တာ၊ 4...
-
-300x300.jpg)
Nema 14 (35mm) ဟိုက်ဘရစ် စတက်ပါ မော်တာ၊ နှစ်ပိုင်းပါ မော်တာ၊ 4...