



၃၆ မီလီမီတာ မိုက်ခရို လီယာနာ စတက်ပါ မော်တာ ၁၂ ဗို့ မြင့်မားသော တွန်းကန်အားဖြင့် ရိုးတံ ဝက်အူ မော်တာ
ဗီဒီယို
ဖော်ပြချက်
VSM36L-048S-0254-113.2 သည် လမ်းညွှန်ဝက်အူပါသည့် through shaft အမျိုးအစား stepping မော်တာတစ်ခုဖြစ်သည်။ rotor သည် နာရီလက်တံလည်ပတ်မှု သို့မဟုတ် နာရီလက်တံဆန့်ကျင်ဘက်လည်ပတ်သည့်အခါ screw rod ၏ထိပ်ကို တပ်ဆင်ရန် လိုအပ်ပြီး လမ်းညွှန်ဝက်အူသည် ရှေ့သို့ သို့မဟုတ် နောက်သို့ရွေ့လျားမည်ဖြစ်သည်။
stepping motor ရဲ့ stepping angle က 7.5 ဒီဂရီရှိပြီး lead spacing က 1.22mm ရှိပါတယ်။ stepper motor က တစ်လှမ်းလှည့်လိုက်တဲ့အခါ lead က 0.0254mm ရွေ့သွားပြီး motor ရဲ့ screw rod ရဲ့ အရှည်ကို customer ရဲ့ လိုအပ်ချက်အလိုက် စိတ်ကြိုက်ပြင်ဆင်နိုင်ပါတယ်။
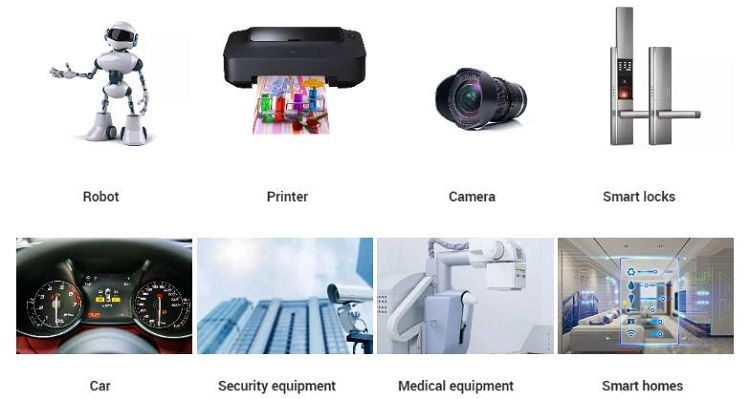
ဒီထုတ်ကုန်က မော်တာလည်ပတ်မှုကို အတွင်းပိုင်းရိုတာနဲ့ ဝက်အူရဲ့ ဆွေမျိုးရွေ့လျားမှုကနေတစ်ဆင့် မျဉ်းဖြောင့်ရွေ့လျားမှုအဖြစ် ပြောင်းလဲပေးပါတယ်။ အဓိကအားဖြင့် အဆို့ရှင်ထိန်းချုပ်မှု၊ အလိုအလျောက်ခလုတ်များ၊ ဆေးဘက်ဆိုင်ရာပစ္စည်းကိရိယာများ၊ အထည်အလိပ်စက်ပစ္စည်းများ၊ ရိုဘော့များနှင့် အခြားဆက်စပ်နယ်ပယ်များတွင် အသုံးပြုပါတယ်။
တစ်ချိန်တည်းမှာပင်၊ ဖောက်သည်လိုအပ်ချက်များအရ ပြင်ပဝါယာကြိုးများကို ချိတ်ဆက်နိုင်သည် သို့မဟုတ် ပလပ်ဘောက်စ်မှ ထုတ်နိုင်သည်။
ကျွန်ုပ်တို့အဖွဲ့သည် stepping motor ဒီဇိုင်း၊ ဖွံ့ဖြိုးတိုးတက်ရေးနှင့် ထုတ်လုပ်မှုတွင် ၁၀ နှစ်ကျော် အတွေ့အကြုံရှိသောကြောင့် ဖောက်သည်များ၏ အထူးလိုအပ်ချက်များအရ ထုတ်ကုန်ဖွံ့ဖြိုးတိုးတက်ရေးနှင့် အရန်ဒီဇိုင်းကို ရရှိနိုင်ပါသည်။
ကန့်သတ်ချက်များ
| ထုတ်ကုန်အမည် | PM36 5v Linear stepper မော်တာ |
| မော်ဒယ် | VSM36L-048S-0254-113.2 |
| ပါဝါ | ၅.၆ ဝပ် |
| ဓာတ်အား | 5V |
| အဆင့် လက်ရှိ | ၅၆၀mA |
| အဆင့်ခုခံမှု | 9(土၁၀%)အုမ်း / ၂၀ ဒီဂရီစင်တီဂရိတ် |
| အဆင့်လျှပ်ကူးမှု | 1၁.၅(±၂၀%)mH I lkHz |
| ခြေလှမ်းထောင့် | 7.5° |
| ဝက်အူကြိုး | ၁.၂၂ |
| ခြေလှမ်းခရီးသွားခြင်း | 0.၀၂၅၄ |
| လိုင်းနားအား | 7၀N/၃၀၀PPS |
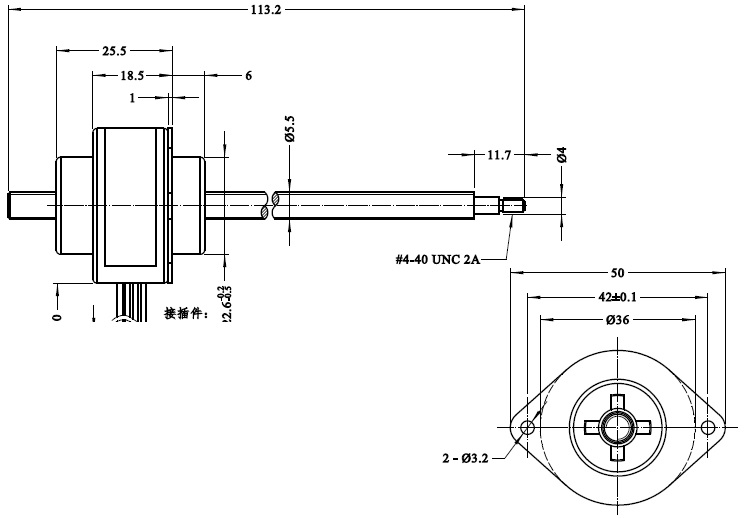
| ဝက်အူအရှည် | ၁၁၃.၂ မီလီမီတာ |
| OEM နှင့် ODM ဝန်ဆောင်မှု | ရရှိနိုင်ပါသည် |
ဒီဇိုင်းပုံဆွဲခြင်း
မော်တာ ကန့်သတ်ချက်များနှင့် သတ်မှတ်ချက်များ
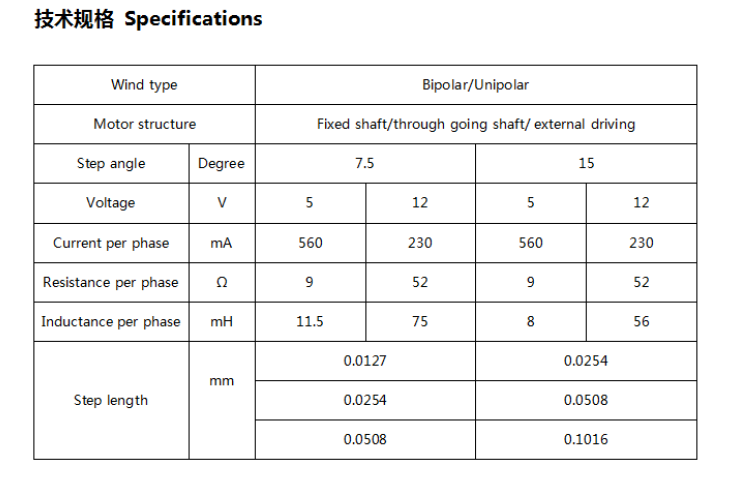
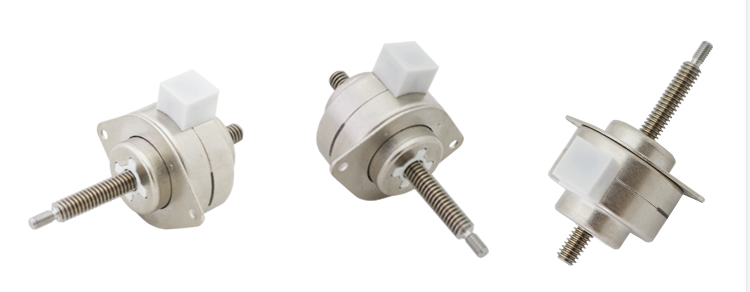
သုံ့ပန်း

ချုပ်နှောင်မထားသော
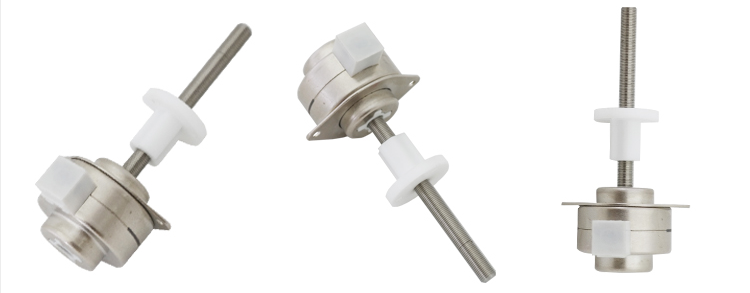
ပြင်ပ
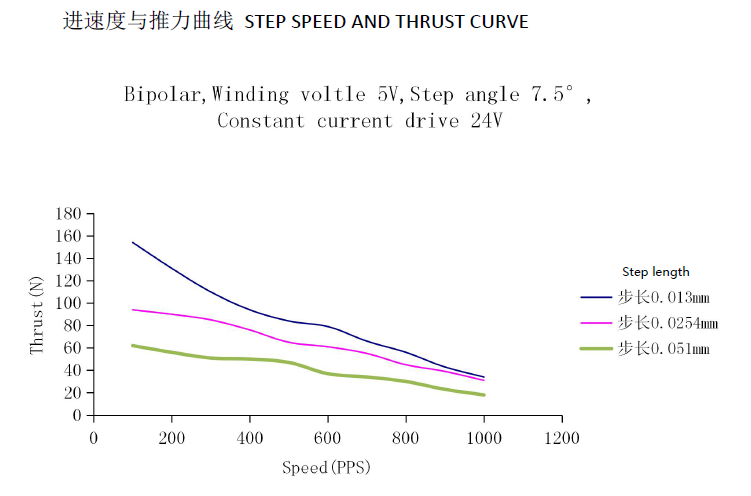
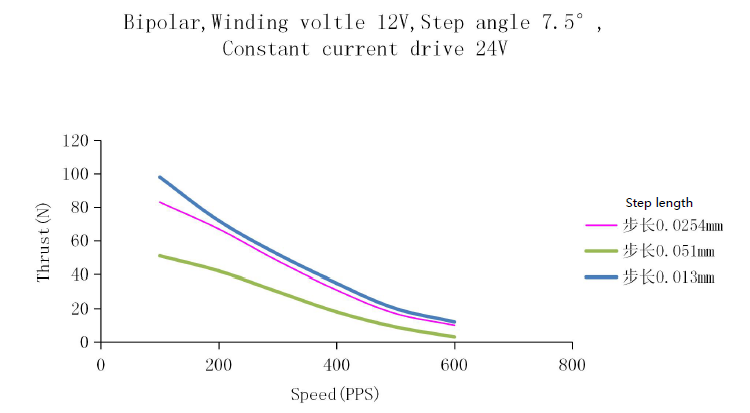
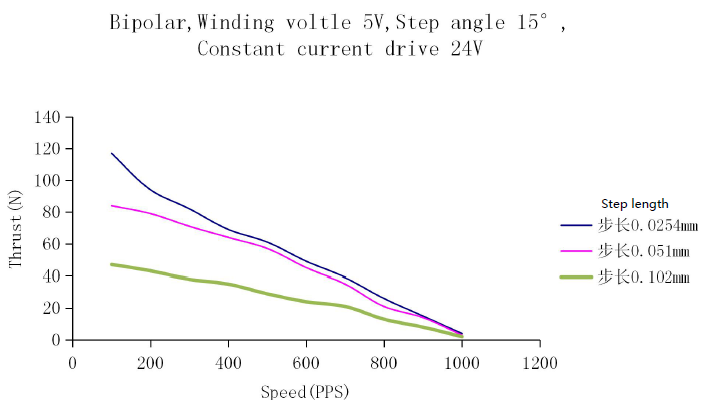
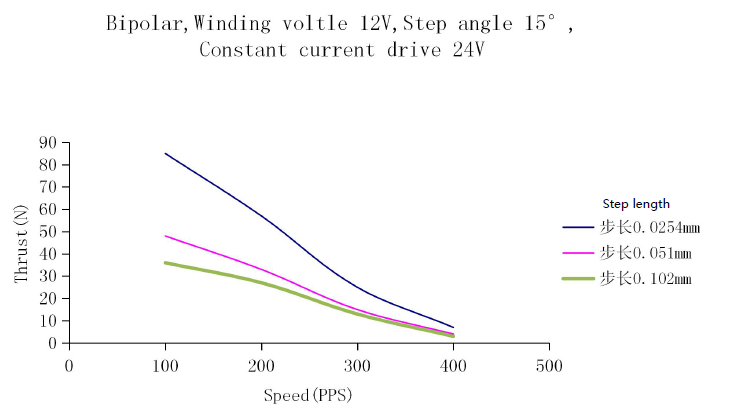
ခြေလှမ်းအမြန်နှုန်းနှင့် တွန်းကန်အားကွေး
လျှောက်လွှာ
စိတ်ကြိုက်ပြင်ဆင်ခြင်း ဝန်ဆောင်မှု
မော်တာသည် ပုံမှန် screw stroke ကို စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်၊
ချိတ်ဆက်ကိရိယာများနှင့် ပလပ်ပေါက်သေတ္တာများကို ဖောက်သည်လိုအပ်ချက်များအရ စိတ်ကြိုက်ပြင်ဆင်နိုင်ပါသည်
ဝက်အူချောင်းက nut ကို စိတ်ကြိုက်ပြင်ဆင်နိုင်ပါတယ်
ပို့ဆောင်ချိန်နှင့်ထုပ်ပိုးမှုအချက်အလက်
နမူနာများအတွက် ပို့ဆောင်ချိန်:
စံမော်တာများ စတော့ရှယ်ယာရှိပါသည်- ၃ ရက်အတွင်း
စံမော်တာများ စတော့ရှယ်ယာမရှိပါ- ၁၅ ရက်အတွင်း
စိတ်ကြိုက်ထုတ်ကုန်များ- ၂၅ ရက်မှ ၃၀ ရက်ခန့် (စိတ်ကြိုက်ပြင်ဆင်မှု၏ ရှုပ်ထွေးမှုအပေါ် အခြေခံ၍)
မှိုအသစ်တစ်ခုတည်ဆောက်ရန် အချိန်ကာလ- ယေဘုယျအားဖြင့် ရက်ပေါင်း ၄၅ ခန့်
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုအတွက် ပို့ဆောင်ချိန်- မှာယူမှုအရေအတွက်အပေါ် အခြေခံသည်
ထုပ်ပိုးမှု:
နမူနာများကို ဖော့စပွန်ချ်ဖြင့် စက္ကူသေတ္တာဖြင့်ထုပ်ပိုးပြီး အမြန်ပို့ဆောင်ပေးပါသည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှု၊ မော်တာများကို အပြင်ဘက်တွင် ဖောက်ထွင်းမြင်ရသောဖလင်ဖြင့် ကွေးကောက်စက္ကူများဖြင့်ထုပ်ပိုးထားသည်။ (လေကြောင်းဖြင့် ပို့ဆောင်သည်)
ပင်လယ်ရေကြောင်းမှ တင်ပို့ပါက ထုတ်ကုန်ကို ပါလက်များဖြင့် ထုပ်ပိုးပါမည်။

ပို့ဆောင်ရေးနည်းလမ်း
နမူနာများနှင့် လေကြောင်းပို့ဆောင်ရေးတွင်၊ ကျွန်ုပ်တို့သည် Fedex/TNT/UPS/DHL ကို အသုံးပြုပါသည်။(အမြန်ဝန်ဆောင်မှုအတွက် ၅ ရက်မှ ၁၂ ရက်အထိ)
ပင်လယ်ရေကြောင်းပို့ဆောင်ရေးအတွက် ကျွန်ုပ်တို့၏ သင်္ဘောပို့ဆောင်ရေးအေးဂျင့်ကို အသုံးပြုပြီး ရှန်ဟိုင်းဆိပ်ကမ်းမှ ပို့ဆောင်ပေးပါသည်။(ပင်လယ်ရေကြောင်းပို့ဆောင်ရေးအတွက် ၄၅~၇၀ ရက်)
အမြဲမေးလေ့ရှိသောမေးခွန်းများ
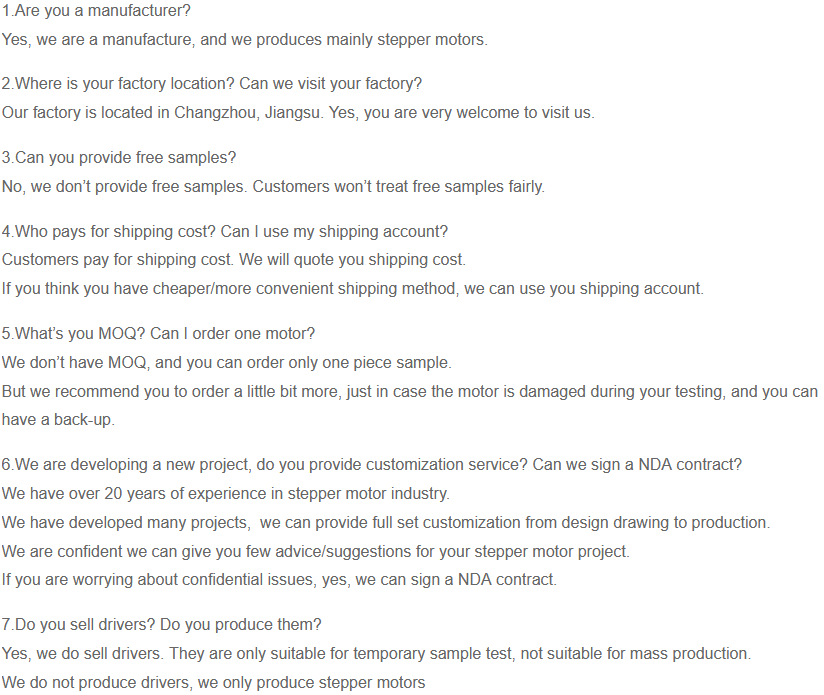
မကြာခဏမေးလေ့ရှိသော မေးခွန်း
၁။ စတက်ပါ မော်တာ pulse signal နှေးကွေးခြင်း
Stepper မော်တာလည်ပတ်နှုန်းသည် input pulse signal ပြောင်းလဲမှုအပေါ် အခြေခံသည်။ သီအိုရီအရ၊ driver ကို pulse တစ်ခုပေးလိုက်လျှင် stepper မော်တာသည် step angle (subdivision for a subdivision step angle) ကို လှည့်သည်။ လက်တွေ့တွင်၊ pulse signal သည် အလွန်လျင်မြန်စွာ ပြောင်းလဲပါက၊ stepper မော်တာသည် internal damping effect ကြောင့် reverse electric potential ကြောင့် rotor နှင့် stator အကြား magnetic response သည် electrical signal ပြောင်းလဲမှုနောက်သို့ မလိုက်ဘဲ ပိတ်ဆို့ခြင်းနှင့် ခြေလှမ်းများ ပျောက်ဆုံးခြင်းတို့ကို ဖြစ်ပေါ်စေလိမ့်မည်။
၂။Stepper motor က curve exponential control speed ကို ဘယ်လိုသုံးရမလဲ။
အဆကွေး၊ ဆော့ဖ်ဝဲပရိုဂရမ်းမင်းတွင်၊ ကွန်ပျူတာမှတ်ဉာဏ်တွင် ပထမဆုံးတွက်ချက်ထားသော အချိန်ကိန်းသေများကို သိမ်းဆည်းပြီး ရွေးချယ်မှုကို ညွှန်ပြသည်။ ပုံမှန်အားဖြင့်၊ stepper မော်တာပြီးမြောက်ရန် အရှိန်နှင့် နှေးကွေးချိန်သည် 300ms သို့မဟုတ် ထို့ထက်ပိုသည်။ အရှိန်နှင့် နှေးကွေးချိန်ကို အလွန်တိုတောင်းစွာအသုံးပြုပါက၊ stepper မော်တာအများစုအတွက် stepper မော်တာများ၏ မြန်နှုန်းမြင့်လည်ပတ်မှုကို ရရှိရန် ခက်ခဲလိမ့်မည်။
သင့်မက်ဆေ့ချ်ကို ကျွန်ုပ်တို့ထံ ပေးပို့ပါ-
ထုတ်ကုန် အမျိုးအစားများ
-

8mm 3.3VDC mini Slider linear stepper မော်တာ၏ ...
-

၂၅ မီလီမီတာ ပြင်ပ drive linear stepper မော်တာ 5VDC s ...
-

၁၈ ဒီဂရီ ခြေလှမ်းထောင့် M3 ခဲဝက်အူ linear ခြေလှမ်း...
-

၂၀ မီလီမီတာ အချင်းရှိသော မြင့်မားသော တိကျမှုရှိသော linear stepper mot ...
-

20mmPM မိုက်ခရို linear stepper မော်တာ 12VDC ချုပ်နှောင်ခံထားရသော...
-

၆ မီလီမီတာ မိုက်ခရို Slider linear stepper မော်တာ ဝက်အူ mot ...