




စိတ်ကြိုက်ပြုပြင်နိုင်သော 30mm အမြဲတမ်းသံလိုက်ဂီယာဘောက်စ် stepper မော်တာ
ဖော်ပြချက်
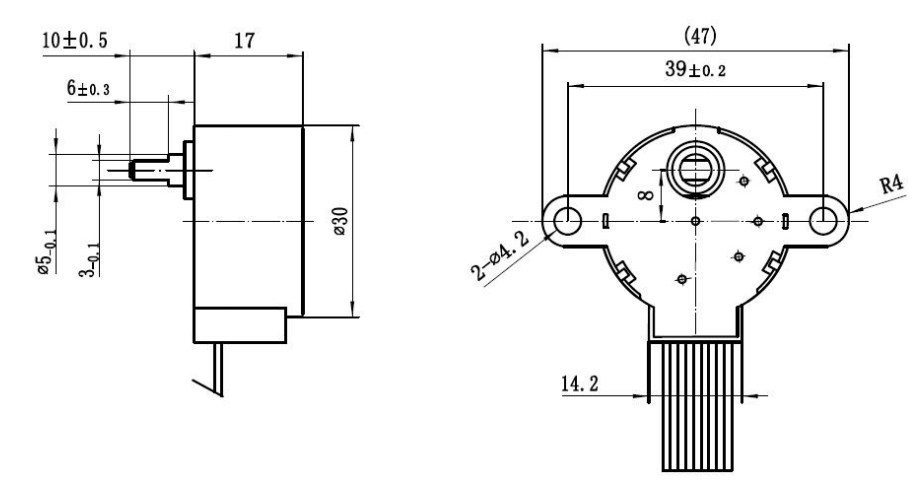
30BYJ46 သည် 30 မီလီမီတာ အမြဲတမ်းသံလိုက်ဂီယာပါ stepper မော်တာတစ်ခုဖြစ်သည်။
ဂီယာဘောက်စ်ရဲ့ ဂီယာအချိုးက 85:1 ပါ
ခြေလှမ်းထောင့်: 7.5° / 85.25
အဆင့်သတ်မှတ်ထားသောဗို့အား: 5VDC; 12VDC; 24VDC
မောင်းနှင်မုဒ်။ ၁-၂ အဆင့်လှုံ့ဆော်မှု သို့မဟုတ် ၂-၂ အဆင့်လှုံ့ဆော်မှုသည် သင့်လိုအပ်ချက်များအရ ၁-၂ အဆင့် သို့မဟုတ် ၂-၂ အဆင့်လှုံ့ဆော်မှု ဖြစ်နိုင်သည်။
ခဲဝါယာကြိုးအရွယ်အစားများသည် UL1061 26AWG သို့မဟုတ် UL2464 26AWG ဖြစ်သောကြောင့် သင်ရွေးချယ်နိုင်ပါသည်။
ဤမော်တာသည် ၎င်း၏ ဈေးနှုန်းချိုသာမှုကြောင့် အသုံးချမှု လုပ်ငန်းအားလုံးတွင် အသုံးများပြီး အထူးသဖြင့် အိမ်သုံးပစ္စည်း လုပ်ငန်းတွင် အသုံးများသည်။
ထို့အပြင်၊ တိကျသောထိန်းချုပ်မှု လိုအပ်သည့် အခြားနေရာများကိုလည်း လုပ်ဆောင်နိုင်ပါသည်။ ကုန်ကျစရိတ်နည်းသော အနေအထားထိန်းချုပ်မှုဖြင့် open loop control ကို ရရှိသည်။
အဖုံးပြား၏ အပေါက်အကွာအဝေး (မီလီမီတာ): ကိုလည်း စိတ်ကြိုက်ပြင်ဆင်နိုင်ပါသည်
ပြင်ပဝါယာကြိုးအစိတ်အပိုင်းကို ဖောက်သည်လိုအပ်ချက်များအရ ချိတ်ဆက်ဝါယာကြိုးအမျိုးအစားနှင့် အရှည်အမျိုးမျိုး သို့မဟုတ် FPC ဖြင့် ချိတ်ဆက်နိုင်သည်။

ကန့်သတ်ချက်များ
| ဗို့အား (V) | ခုခံမှု (Ω) | ဆွဲသွင်း torque 100PPS (mN*m) | ထိန်းထားနိုင်သော torque (mN*m) | ဆွဲသွင်းသည့်ကြိမ်နှုန်း (PPS) ကို ဖြုတ်ချခြင်း |
| 12 | ၁၁၀ | ≥၉၈ | ≥၃၉.၂ | ≥၃၅၀ |
| 12 | ၁၃၀ | ≥၇၈.၄ | ≥၃၉.၂ | ≥၃၅၀ |
| 12 | ၂၀၀ | ≥၅၈.၈ | ≥၃၉.၂ | ≥၃၅၀ |
ဒီဇိုင်းပုံဆွဲခြင်း- Output shaft ကို စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်
စိတ်ကြိုက်ပြင်ဆင်နိုင်သော အင်္ဂါရပ်များ
ဗို့အား: 5-24V
ဂီယာပစ္စည်း၊
ထွက်ပေါက်ဝင်ရိုး၊
မော်တာအဖုံးဒီဇိုင်းကို စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်
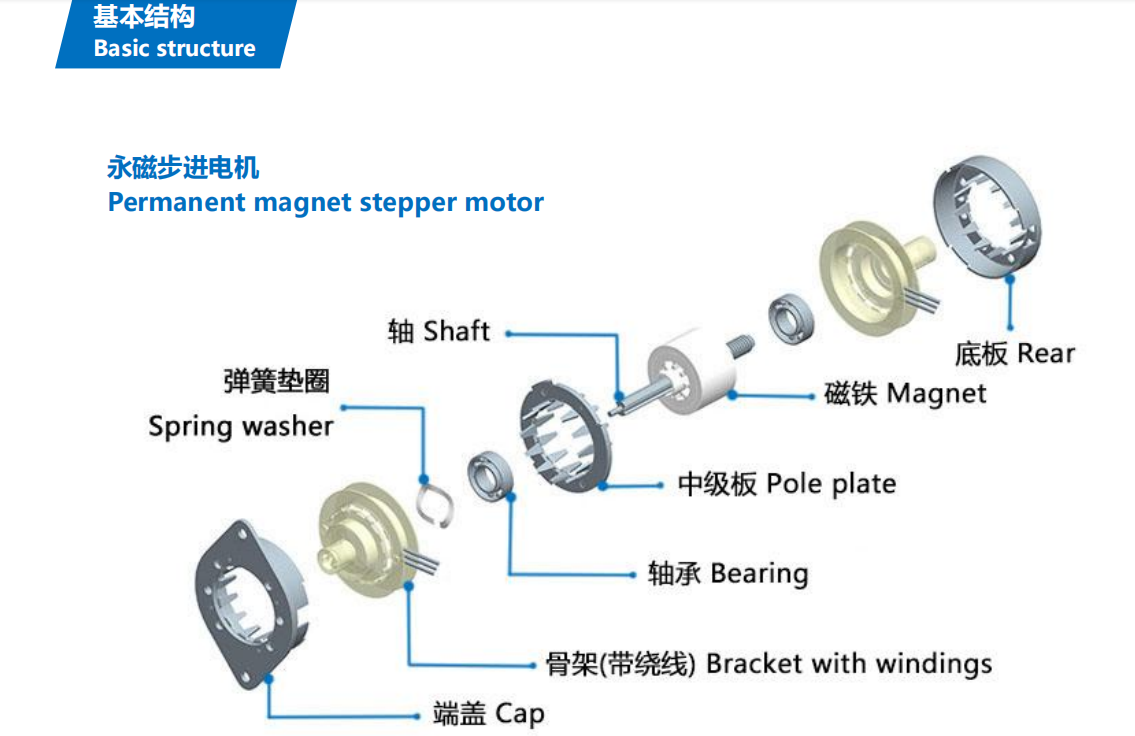
PM stepper motor ရဲ့ အခြေခံဖွဲ့စည်းပုံအကြောင်း
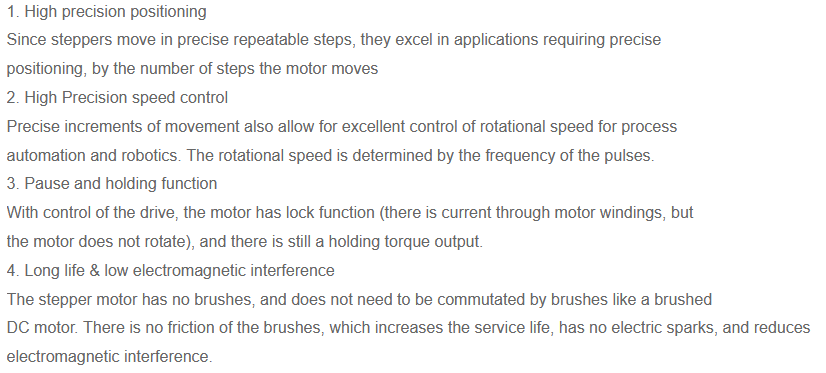
အင်္ဂါရပ်များနှင့် အားသာချက်
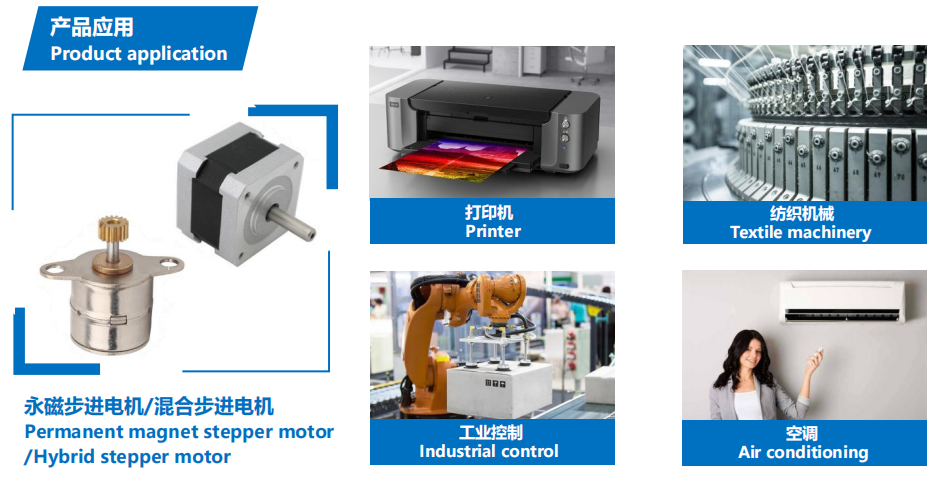
PM stepper မော်တာ အသုံးချမှု
ပရင်တာ၊
အထည်အလိပ်စက်ယန္တရားများ၊
စက်မှုလုပ်ငန်းထိန်းချုပ်မှု၊
သန့်ရှင်းရေးပစ္စည်းများ၊
သာမိုစတက်တစ် အဆို့ရှင်၊
ရေနွေးပိုက်ခေါင်းများ၊
ရေအပူချိန်ကို အလိုအလျောက် ချိန်ညှိပေးခြင်း
တံခါးသော့များ
လေအေးပေးစနစ်
ရေသန့်စင်စက် အဆို့ရှင် စသည်တို့။
stepper မော်တာရဲ့ အလုပ်လုပ်ပုံ အခြေခံမူ
stepper motor ရဲ့ drive ကို software က ထိန်းချုပ်ပါတယ်။ motor လည်ပတ်ဖို့ လိုအပ်တဲ့အခါ drive က
stepper motor pulses များကို အသုံးပြုပါ။ ဤ pulses များသည် stepper motor များကို သတ်မှတ်ထားသော အစီအစဉ်အတိုင်း စွမ်းအင်ပေးသည်၊ ထို့ကြောင့်
မော်တာ၏ ရိုတာကို သတ်မှတ်ထားသော ဦးတည်ချက် (နာရီလက်တံလည်ပတ်မှု သို့မဟုတ် နာရီလက်တံဆန့်ကျင်ဘက်လည်ပတ်မှု) ဖြင့် လည်ပတ်စေသည်။
မော်တာ၏ မှန်ကန်သောလည်ပတ်မှုကို သဘောပေါက်စေသည်။ မော်တာသည် ဒရိုက်ဘာထံမှ ပဲ့တင်ထပ်မှုကို လက်ခံရရှိတိုင်း ၎င်းသည် step angle (full-step drive ဖြင့်) ဖြင့် လည်ပတ်မည်ဖြစ်ပြီး မော်တာ၏ လည်ပတ်ထောင့်ကို မောင်းနှင်သော ပဲ့တင်ထပ်မှုအရေအတွက်နှင့် step angle ဖြင့် ဆုံးဖြတ်သည်။
ကြာမြင့်ချိန်
ကျွန်ုပ်တို့တွင် နမူနာများရှိပါက၊ နမူနာများကို ၃ ရက်အတွင်း ပို့ဆောင်ပေးနိုင်ပါသည်။
ကျွန်ုပ်တို့တွင် နမူနာများ မရှိပါက ၎င်းတို့ကို ထုတ်လုပ်ရန် လိုအပ်ပြီး ထုတ်လုပ်မှုအချိန်သည် ပြက္ခဒိန်ရက် ၂၀ ခန့်ဖြစ်သည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုအတွက်၊ ပို့ဆောင်ချိန်သည် မှာယူမှုပမာဏပေါ်တွင် မူတည်ပါသည်။
ထုပ်ပိုးခြင်း
နမူနာများကို ဖော့စပွန်ချ်ဖြင့် စက္ကူသေတ္တာဖြင့်ထုပ်ပိုးပြီး အမြန်ပို့ဆောင်ပေးပါသည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှု၊ မော်တာများကို အပြင်ဘက်တွင် ဖောက်ထွင်းမြင်ရသောဖလင်ဖြင့် ကွေးကောက်စက္ကူများဖြင့်ထုပ်ပိုးထားသည်။ (လေကြောင်းဖြင့် ပို့ဆောင်သည်)
ပင်လယ်ရေကြောင်းမှ တင်ပို့ပါက ထုတ်ကုန်ကို ပါလက်များဖြင့် ထုပ်ပိုးပါမည်။

ငွေပေးချေမှုနည်းလမ်းနှင့် ငွေပေးချေမှုစည်းကမ်းချက်များ
နမူနာများအတွက်၊ ယေဘုယျအားဖြင့် ကျွန်ုပ်တို့သည် Paypal သို့မဟုတ် alibaba ကိုလက်ခံပါသည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုအတွက်၊ ကျွန်ုပ်တို့သည် T/T ငွေပေးချေမှုကိုလက်ခံပါသည်။
နမူနာများအတွက်၊ ထုတ်လုပ်မှုမပြုလုပ်မီ အပြည့်အဝငွေပေးချေမှုကို ကျွန်ုပ်တို့ကောက်ခံပါသည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုအတွက်၊ ထုတ်လုပ်မှုမတိုင်မီ ၅၀% ကြိုတင်ငွေပေးချေမှုကို ကျွန်ုပ်တို့လက်ခံနိုင်ပြီး ကျန် ၅၀% ကို ပို့ဆောင်ခြင်းမပြုမီ ကောက်ခံနိုင်ပါသည်။
ကျွန်ုပ်တို့သည် မှာယူမှုကို ၆ ကြိမ်ထက်ပို၍ ပူးပေါင်းဆောင်ရွက်ပြီးနောက်၊ A/S (မြင်ပြီးနောက်) ကဲ့သို့သော အခြားငွေပေးချေမှုစည်းကမ်းချက်များကို ညှိနှိုင်းနိုင်ပါသည်။
အမြဲမေးလေ့ရှိသောမေးခွန်းများ
၁။ ဂီယာဘောက်စ်ပါသည့် stepper မော်တာများ၏ အကြောင်းရင်းများ
Stepper motor switch သည် stator phase current ၏ frequency ကိုပြောင်းလဲခြင်း၊ stepper motor drive circuit ၏ input pulse ကိုပြောင်းလဲခြင်းကဲ့သို့သော low-speed movement ဖြစ်လာစေသည်။ Low-speed stepper motor သည် stepping command ကိုစောင့်ဆိုင်းနေစဉ် rotor သည် stop state တွင်ရှိနေပြီး low-speed stepping တွင် speed အတက်အကျအလွန်များပြားလိမ့်မည်၊ ဤအချိန်တွင် high-speed operation သို့ပြောင်းလဲခြင်းကဲ့သို့သော speed အတက်အကျပြဿနာကိုဖြေရှင်းနိုင်သော်လည်း torque မလုံလောက်ပါ။ ဆိုလိုသည်မှာ low speed သည် torque အတက်အကျများစေပြီး high speed သည် torque မလုံလောက်သောကြောင့် reducer များကိုအသုံးပြုရန်လိုအပ်သည်။
၂။ stepper မော်တာများအတွက် အသုံးများသော ဂီယာဘောက်စ်များကား အဘယ်နည်း။
Stepper မော်တာများကို planetary reducers၊ worm gear reducers၊ parallel gear reducers နှင့် filament gear reducers ကဲ့သို့သော reducers များဖြင့် တပ်ဆင်ထားသည်။
သင့်မက်ဆေ့ချ်ကို ကျွန်ုပ်တို့ထံ ပေးပို့ပါ-
ထုတ်ကုန် အမျိုးအစားများ
-

၂၄ မီလီမီတာ အမြဲတမ်းသံလိုက်ဂီယာဘောက်စ် stepper မော်တာဂီယာ ...
-

၂-အဆင့် ၄-ဝါယာကြိုး အမြဲတမ်းသံလိုက် ၂၅ မီလီမီတာ ခြေလှမ်းမော်တာ...
-

၂၈ မီလီမီတာ အမြဲတမ်းသံလိုက်ဂီယာဘောက်စ် stepper မော်တာအဖုံး...
-

35BYJ46 အမြဲတမ်းသံလိုက် stepper မော်တာ 35mm ste...
-

ဆူညံသံနည်းသော ၅၀ မီလီမီတာ အချင်းရှိသော အမြဲတမ်းသံလိုက် stepp...