




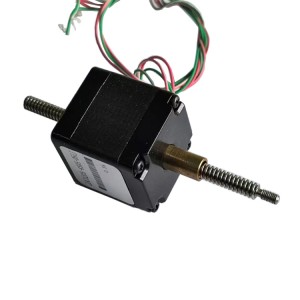
NEMA34 86mm linear hybrid stepper မော်တာ ပြင်ပ drive မြင့်မားသော thrust
ဖော်ပြချက်
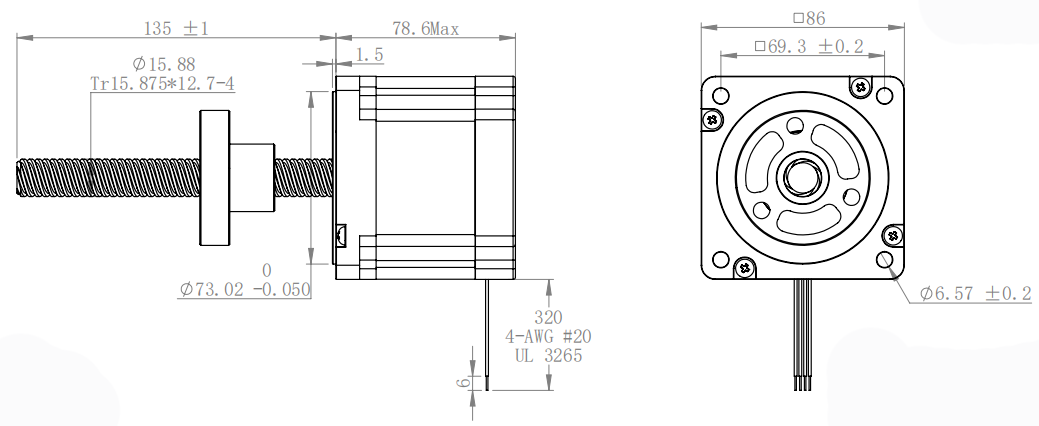
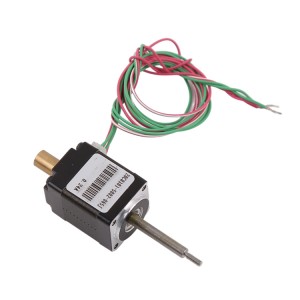
NEMA 34 hybrid stepper motor သည် အရွယ်အစား 86mm ရှိသည်။
၎င်းတွင် ထိပ်တွင် 135mm အရှည်ရှိသော lead screw shaft ပါသည့် external drive linear stepper motor လည်းပါဝင်ပြီး ၎င်းနှင့် ကိုက်ညီသော plastic nut/slide တစ်ခုလည်း ပါရှိသည်။
ခဲဝက်အူ မော်ဒယ်နံပါတ်မှာ- Tr15.875*P3.175*4N ဖြစ်သည်။
ခဲဝက်အူရဲ့ အကွာအဝေးက 3.17mm ရှိပြီး စတင်မှု ၄ ခုရှိတာကြောင့် ခဲ = စတင်နံပါတ် * ခဲဝက်အူ အကွာအဝေး = 4 * 3.175mm = 12.7mm ပါ။
ဒါကြောင့် မော်တာရဲ့ ခြေလှမ်းအရှည်က - ၁၂.၇ မီလီမီတာ/ခြေလှမ်း ၂၀၀=၀.၀၆၃၅ မီလီမီတာ/ခြေလှမ်း ဖြစ်ပါတယ်။
ကျွန်ုပ်တို့တွင် ရွေးချယ်စရာများအတွက် အခြား lead screw အမျိုးအစားလည်း ရှိပြီး ၎င်းသည် မော်တာ၏ thrust နှင့် linear speed အပေါ် ဖောက်သည်၏ လိုအပ်ချက်ပေါ် မူတည်ပါသည်။

ကန့်သတ်ချက်များ
| မော်ဒယ်နံပါတ် | SM86C0905 |
| မော်တာအချင်း | ၈၆ မီလီမီတာ (NEMA34) |
| မောင်းနှင်ဗို့အား | 5V DC |
| ကွိုင်ခုခံမှု | ၁.၆Ω±10%/အဆင့် |
| အဆင့်အရေအတွက် | အဆင့် ၂ ဆင့်(စိတ်နှစ်ခွဖြစ်ခြင်း) |
| ခြေလှမ်းထောင့် | 1.၈°/ခြေလှမ်း |
| လက်ရှိနှုန်းထား | ၃.၁၂ အေ/အဆင့် |
| အနည်းဆုံးတွန်းကန်အား (300PPS) | ၅၀ ကီလိုဂရမ် |
| ခြေလှမ်းအရှည် | ၀.၀၆၃၅ မီလီမီတာ/ခြေလှမ်း |
ခဲဝက်အူ ကန့်သတ်ချက်
| ခဲဝက်အူအမျိုးအစား | တြိဂံပုံ ဝက်အူ |
| ခဲဝက်အူ မော်ဒယ်နံပါတ် | Tr15.875*P3.175*4N |
| အပြင်ဘက် အချင်း | ၁၅..၈၇၅ မီလီမီတာ |
| ခဲ | ၁၂.၇ မီလီမီတာ |
| စတင်သည်များ | 4 |
| ပစ်ချခြင်း | ၃.၁၇၅ မီလီမီတာ |
| ခြေလှမ်းအရှည် | ၀.၀၆၃၅ မီလီမီတာ/ခြေလှမ်း |
ဒီဇိုင်းပုံဆွဲခြင်း
ခဲဝက်အူအကြောင်း
linear hybrid stepper motor တွင် အသုံးပြုသော lead screw သည် ယေဘုယျအားဖြင့် trapezoidal lead screw ဖြစ်သည်။
ဥပမာ Tr3.5*P0.3*1N ခဲဝက်အူအတွက်။
Tr ဆိုသည်မှာ trapezoidal lead screw အမျိုးအစားကို ဆိုလိုသည်။
P0.3 ဆိုသည်မှာ lead screw ၏ pitch သည် 0.3mm ဖြစ်သည်ကို ဆိုလိုသည်။
1N ဆိုတာက single start lead screw လို့ အဓိပ္ပာယ်ရပါတယ်။
ခဲဝက်အူ ခဲ=စတင်နံပါတ်*အသံအတိုးအကျယ်
ဒီတိကျတဲ့ ခဲဝက်အူအတွက်က 0.3mm ခဲပါ။
hybrid stepper မော်တာ၏ stepper angle သည် တစ်လှမ်းလျှင် 1.8 ဒီဂရီဖြစ်ပြီး တစ်ကြိမ်လှည့်ရန် ခြေလှမ်း ၂၀၀ ကြာသည်။
ခြေလှမ်းအလျားသည် မော်တာသည် တစ်လှမ်းတည်းလှမ်းသောအခါတွင် ပြုလုပ်သော မျဉ်းဖြောင့်ရွေ့လျားမှုဖြစ်သည်။
၀.၃ မီလီမီတာ ခဲဝက်အူအတွက်၊ အဆင့်အလျားသည် ၀.၃ မီလီမီတာ/အဆင့် ၂၀၀ = ၀.၀၀၁၅ မီလီမီတာ/အဆင့် ဖြစ်သည်
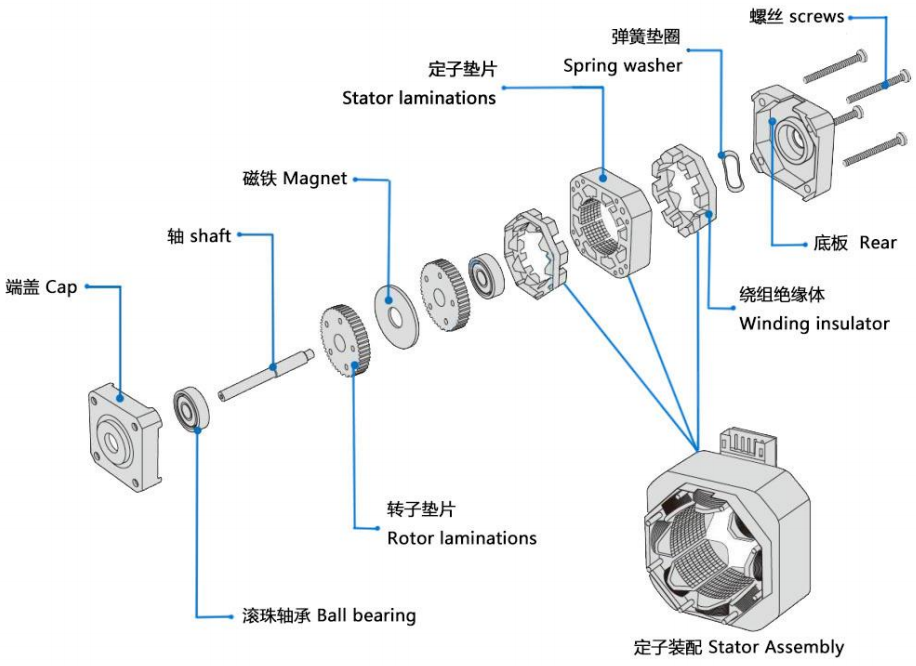
NEMA stepper မော်တာများ၏ အခြေခံဖွဲ့စည်းပုံ
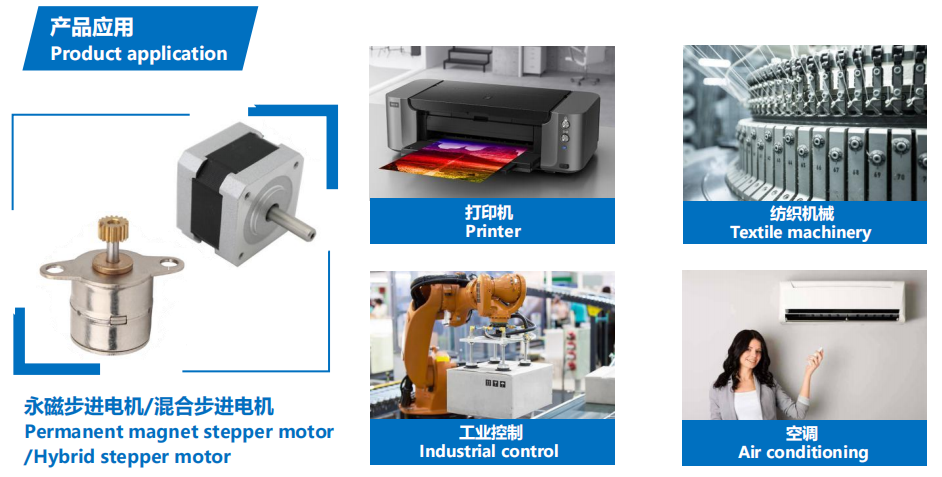
Hybrid stepper မော်တာ၏ အသုံးချမှု
ဟိုက်ဘရစ်စတက်ပါမော်တာများ၏ မြင့်မားသော ရုပ်ထွက်အရည်အသွေးကြောင့် (တစ်ပတ်လည်လျှင် အဆင့် ၂၀၀ သို့မဟုတ် ၄၀၀)၊ ၎င်းတို့ကို မြင့်မားသော တိကျမှုလိုအပ်သော အသုံးချမှုများအတွက် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုကြသည်-
3D ပုံနှိပ်ခြင်း
စက်မှုထိန်းချုပ်မှု (CNC၊ အလိုအလျောက်ကြိတ်စက်၊ အထည်အလိပ်စက်ပစ္စည်းများ)
ကွန်ပျူတာ ဆက်စပ်ပစ္စည်းများ
ထုပ်ပိုးစက်
နှင့် မြင့်မားသော တိကျမှုရှိသော ထိန်းချုပ်မှု လိုအပ်သော အခြား အလိုအလျောက်စနစ်များ။
ဖောက်သည်များသည် “stepper မော်တာများကို ဦးစွာရွေးချယ်ပြီးနောက် ရှိပြီးသား stepper မော်တာအပေါ် အခြေခံ၍ driver ကို ရွေးချယ်ပါ” ဟူသော မူကို လိုက်နာသင့်သည်။
hybrid stepping motor ကို မောင်းနှင်ရန်အတွက် full-step driving mode ကို အသုံးမပြုခြင်းသည် အကောင်းဆုံးဖြစ်ပြီး၊ full-step မောင်းနှင်မှုအောက်တွင် တုန်ခါမှု ပိုမိုကြီးမားပါသည်။
Hybrid stepper မော်တာသည် မြန်နှုန်းနိမ့်အခါသမယများအတွက် ပိုမိုသင့်လျော်ပါသည်။ အမြန်နှုန်းသည် 1000 rpm (0.9 ဒီဂရီတွင် 6666PPS) ထက်မပိုစေရန်၊ 1000-3000PPS (0.9 ဒီဂရီ) အကြားတွင် ပိုမိုကောင်းမွန်စွာ အသုံးပြုရန် အကြံပြုထားပြီး ၎င်း၏အမြန်နှုန်းကို လျှော့ချရန် ဂီယာဘောက်စ်တစ်ခုနှင့် တွဲဖက်အသုံးပြုနိုင်ပါသည်။ မော်တာသည် သင့်လျော်သော ကြိမ်နှုန်းတွင် မြင့်မားသော အလုပ်လုပ်နိုင်စွမ်းနှင့် ဆူညံသံနည်းပါးပါသည်။
သမိုင်းကြောင်းဆိုင်ရာ အကြောင်းပြချက်များကြောင့်၊ အမည်ခံ 12V ဗို့အားရှိသော မော်တာသာလျှင် 12V ကို အသုံးပြုသည်။ ဒီဇိုင်းပုံတွင် အခြားသတ်မှတ်ထားသော ဗို့အားသည် မော်တာအတွက် အသင့်တော်ဆုံး မောင်းနှင်ဗို့အား အတိအကျ မဟုတ်ပါ။ ဖောက်သည်များသည် ကိုယ်ပိုင်လိုအပ်ချက်အပေါ် အခြေခံ၍ သင့်လျော်သော မောင်းနှင်ဗို့အားနှင့် သင့်လျော်သော ဒရိုက်ဘာကို ရွေးချယ်သင့်သည်။
မော်တာကို မြန်နှုန်းမြင့် သို့မဟုတ် ဝန်များသော အချိန်တွင် အသုံးပြုသည့်အခါ ယေဘုယျအားဖြင့် အလုပ်လုပ်သော မြန်နှုန်းဖြင့် တိုက်ရိုက်မစတင်ပါ။ ကြိမ်နှုန်းနှင့် မြန်နှုန်းကို တဖြည်းဖြည်း တိုးမြှင့်ရန် ကျွန်ုပ်တို့ အကြံပြုအပ်ပါသည်။ အကြောင်းရင်းနှစ်ခုကြောင့်- ပထမအချက်မှာ မော်တာသည် အဆင့်များ မဆုံးရှုံးပါ၊ ဒုတိယအချက်မှာ ဆူညံသံကို လျှော့ချနိုင်ပြီး နေရာချထားမှု တိကျမှုကို တိုးတက်စေပါသည်။
မော်တာသည် တုန်ခါမှုဧရိယာ (600 PPS အောက်) တွင် အလုပ်မလုပ်သင့်ပါ။ ၎င်းကို နှေးကွေးသောအမြန်နှုန်းဖြင့် အသုံးပြုရမည်ဆိုပါက ဗို့အား၊ လျှပ်စီးကြောင်းကို ပြောင်းလဲခြင်း သို့မဟုတ် တုန်ခါမှုအချို့ကို ထည့်သွင်းခြင်းဖြင့် တုန်ခါမှုပြဿနာကို လျှော့ချနိုင်သည်။
မော်တာသည် 600PPS (0.9 ဒီဂရီ) အောက်တွင်အလုပ်လုပ်သောအခါ၊ ၎င်းကို လျှပ်စီးကြောင်းသေးငယ်ခြင်း၊ inductance ကြီးမားသောနှင့် ဗို့အားနိမ့်ခြင်းဖြင့် မောင်းနှင်သင့်သည်။
moment of inertia များသော ဝန်များအတွက် အရွယ်အစားကြီးသော မော်တာကို ရွေးချယ်သင့်သည်။
ပိုမိုမြင့်မားသောတိကျမှုလိုအပ်သည့်အခါ ဂီယာဘောက်စ်ထည့်သွင်းခြင်း၊ မော်တာအမြန်နှုန်းကိုတိုးမြှင့်ခြင်း သို့မဟုတ် subdivision မောင်းနှင်မှုကို အသုံးပြုခြင်းဖြင့် ၎င်းကိုဖြေရှင်းနိုင်သည်။ ထို့အပြင် 5-phase မော်တာ (unipolar မော်တာ) ကိုအသုံးပြုနိုင်သော်လည်း စနစ်တစ်ခုလုံး၏စျေးနှုန်းမှာ အတော်လေးစျေးကြီးသောကြောင့် ရှားရှားပါးပါးသာအသုံးပြုကြသည်။
Stepper မော်တာ အရွယ်အစား:
ကျွန်ုပ်တို့တွင် လက်ရှိတွင် 20mm (NEMA8)၊ 28mm (NEMA11)၊ 35mm (NEMA14)၊ 42mm (NEMA17)၊ 57mm (NEMA23)၊ 86mm (NEMA34) hybrid stepper motor များရှိပါသည်။ hybrid stepper motor ကို ရွေးချယ်သောအခါ မော်တာအရွယ်အစားကို ဦးစွာဆုံးဖြတ်ပြီးမှ အခြား parameter ကို အတည်ပြုရန် အကြံပြုအပ်ပါသည်။
စိတ်ကြိုက်ပြင်ဆင်ခြင်း ဝန်ဆောင်မှု
မော်တာ၏ဒီဇိုင်းကို ဖောက်သည်၏လိုအပ်ချက်အပေါ် အခြေခံ၍ ချိန်ညှိနိုင်သည်- အပါအဝင်
မော်တာ၏အချင်း: ကျွန်ုပ်တို့တွင် ၆ မီလီမီတာ၊ ၈ မီလီမီတာ၊ ၁၀ မီလီမီတာ၊ ၁၅ မီလီမီတာနှင့် ၂၀ မီလီမီတာအချင်းရှိသော မော်တာရှိသည်
ကွိုင်ခုခံမှု/ အဆင့်သတ်မှတ်ထားသောဗို့အား- ကွိုင်ခုခံမှုကို ချိန်ညှိနိုင်ပြီး၊ ခုခံမှုမြင့်မားလေ မော်တာ၏ အဆင့်သတ်မှတ်ထားသောဗို့အား ပိုမိုမြင့်မားလေဖြစ်သည်။
ကွင်းဒီဇိုင်း/ ခဲဝက်အူအရှည်- ဖောက်သည်က ကွင်းကို ပိုရှည်/တိုစေလိုပါက၊ တပ်ဆင်သည့်အပေါက်များကဲ့သို့သော အထူးဒီဇိုင်းဖြင့် ချိန်ညှိနိုင်သည်။
PCB + ကြိုးများ + ချိတ်ဆက်ကိရိယာ- PCB ၏ ဒီဇိုင်း၊ ကြိုးအရှည်နှင့် ချိတ်ဆက်ကိရိယာ အနိမ့်အမြင့်အားလုံးကို ချိန်ညှိနိုင်ပြီး ဖောက်သည်များ လိုအပ်ပါက FPC အဖြစ် အစားထိုးနိုင်သည်။
ကြာမြင့်ချိန်
ကျွန်ုပ်တို့တွင် နမူနာများရှိပါက၊ နမူနာများကို ၃ ရက်အတွင်း ပို့ဆောင်ပေးနိုင်ပါသည်။
ကျွန်ုပ်တို့တွင် နမူနာများ မရှိပါက ၎င်းတို့ကို ထုတ်လုပ်ရန် လိုအပ်ပြီး ထုတ်လုပ်မှုအချိန်သည် ပြက္ခဒိန်ရက် ၂၀ ခန့်ဖြစ်သည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုအတွက်၊ ပို့ဆောင်ချိန်သည် မှာယူမှုပမာဏပေါ်တွင် မူတည်ပါသည်။
ငွေပေးချေမှုနည်းလမ်းနှင့် ငွေပေးချေမှုစည်းကမ်းချက်များ
နမူနာများအတွက်၊ ယေဘုယျအားဖြင့် ကျွန်ုပ်တို့သည် Paypal သို့မဟုတ် alibaba ကိုလက်ခံပါသည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုအတွက်၊ ကျွန်ုပ်တို့သည် T/T ငွေပေးချေမှုကိုလက်ခံပါသည်။
နမူနာများအတွက်၊ ထုတ်လုပ်မှုမပြုလုပ်မီ အပြည့်အဝငွေပေးချေမှုကို ကျွန်ုပ်တို့ကောက်ခံပါသည်။
အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုအတွက်၊ ထုတ်လုပ်မှုမတိုင်မီ ၅၀% ကြိုတင်ငွေပေးချေမှုကို ကျွန်ုပ်တို့လက်ခံနိုင်ပြီး ကျန် ၅၀% ကို ပို့ဆောင်ခြင်းမပြုမီ ကောက်ခံနိုင်ပါသည်။
ကျွန်ုပ်တို့သည် မှာယူမှုကို ၆ ကြိမ်ထက်ပို၍ ပူးပေါင်းဆောင်ရွက်ပြီးနောက်၊ A/S (မြင်ပြီးနောက်) ကဲ့သို့သော အခြားငွေပေးချေမှုစည်းကမ်းချက်များကို ညှိနှိုင်းနိုင်ပါသည်။
အမြဲမေးလေ့ရှိသောမေးခွန်းများ
၁။ နမူနာများအတွက် ယေဘုယျပို့ဆောင်ချိန် ဘယ်လောက်ကြာမလဲ။ ကြီးမားသော အော်ဒါများအတွက် ပို့ဆောင်ချိန် ဘယ်လောက်ကြာမလဲ။
နမူနာမှာယူမှုအတွက် ကြာမြင့်ချိန် ၁၅ ရက်ခန့်၊ အစုလိုက်အပြုံလိုက်မှာယူမှုအတွက် ကြာမြင့်ချိန် ၂၅-၃၀ ရက်ဖြစ်သည်။
၂။ စိတ်ကြိုက်ဝန်ဆောင်မှုများကို လက်ခံပါသလား။
ကျွန်ုပ်တို့သည် ထုတ်ကုန်များကို စိတ်ကြိုက်ပြင်ဆင်ခြင်းကို လက်ခံပါသည်။ မော်တာ parameter၊ ခဲဝါယာကြိုးအမျိုးအစား၊ ထွက်ရိုးတံစသည်တို့ အပါအဝင်။
၃။ ဒီမော်တာမှာ encoder ထည့်လို့ရပါသလား။
ဒီမော်တာအမျိုးအစားအတွက်၊ မော်တာဝတ်ဆင်အဖုံးပေါ်တွင် encoder ထည့်နိုင်သည်။
မကြာခဏမေးလေ့ရှိသော မေးခွန်း
၁။ stepper မော်တာများ၏ bipolar နှင့် unipolar ဝါယာကြိုးများအကြား ကွာခြားချက်ကား အဘယ်နည်း။
နှစ်ထပ်နှစ်ထပ်ချိတ်ဆက်မှုများပါရှိသော Stepper မော်တာများသည် လျှပ်စီးကြောင်းကို တစ်ဖက်တည်းသော ကွိုင် (bipolar drive) တွင် ဦးတည်ချက်နှစ်ခုလုံးသို့ စီးဆင်းစေသည့် drive နည်းလမ်းကို အသုံးပြုကြသည်။
single-pole ချိတ်ဆက်မှုပါရှိသော stepper မော်တာတွင် အလယ်ဗဟိုရေပိုက်တစ်ခုရှိပြီး လျှပ်စီးကြောင်းသည် တစ်ခုတည်းသော winding (single-pole drive) တွင် အမြဲတမ်း ပုံသေဦးတည်ချက်ဖြင့် စီးဆင်းသည့် drive နည်းလမ်းကို အသုံးပြုသည်။
၂။ စတင်-ရပ်တန့် လည်ပတ်မှုမုဒ်တွင် Stepper မော်တာ စတင်၍မရသည့် အကြောင်းရင်းများနှင့် လုပ်ဆောင်ခြင်းနည်းလမ်းများ
က။ ဝန်အား အလွန်ကြီးသည်- မော်တာရွေးချယ်မှုအမှားအယွင်း၊ မော်တာ၏ ပိုကြီးသောအရွယ်အစားကို ရွေးချယ်ပါ။
ခ။ ကြိမ်နှုန်း အလွန်မြင့်သည်- ကြိမ်နှုန်းကို လျှော့ချပါ
ဂ။ မော်တာသည် ရှေ့တိုးနောက်ငင် လှုပ်ရှားနေပါက သို့မဟုတ် torque အလွန်နည်းပါက၊ ၎င်းသည် phase ပျက်စီးမှု သို့မဟုတ် ဆားကစ်ပျက်နေကြောင်း ညွှန်ပြနေပါက- မော်တာကို အစားထိုးပါ သို့မဟုတ် ပြုပြင်ပါ။
ဃ။ အဆင့်လျှပ်စီးကြောင်း မလုံလောက်ပါ- အနည်းဆုံး စတင်သည့် ပထမအဆင့်အနည်းငယ်အတွက် အဆင့်လျှပ်စီးကြောင်းကို တိုးမြှင့်ပါ
၃။ အရှိန်မြှင့်ပြီးသွားသော်လည်း တည်ငြိမ်သောအမြန်နှုန်းသို့ရောက်ရှိသောအခါ လည်ပတ်မှုရပ်တန့်သွားသော stepper မော်တာများအတွက် အကြောင်းရင်းများနှင့် ဖြေရှင်းချက်များ။
အကြောင်းရင်း- stepper motor သည် ၎င်း၏ စွမ်းရည်ကန့်သတ်ချက်တွင် လည်ပတ်နေပြီး အလွန်အကျွံ အရှိန်မြှင့်ခြင်းကြောင့် ရပ်တန့်သွားသည်။ rotor သည် တုန်ခါပြီး မတည်မငြိမ် လည်ပတ်နေသည်။
ဖြေရှင်းချက်။
① အရှိန်မြှင့်ခြင်းကို လျှော့ချပါ၊ ဆိုလိုသည်မှာ အရှိန်နိမ့်သော အရှိန်ကို ရွေးချယ်ပါ သို့မဟုတ် အစတွင် မြင့်မားပြီး အမြင့်ဆုံးအမြန်နှုန်းအနီးတွင် နိမ့်သော အရှိန်မြှင့်အဆင့်နှစ်ခုကို အသုံးပြုပါ။
② လှည့်အားကို တိုးမြှင့်ပါ
③နောက်ဘက်ဝင်ရိုးတွင် စက်ပိုင်းဆိုင်ရာ damper တစ်ခုထည့်ပါ၊ သို့သော် ၎င်းသည် rotor inertia ကို တိုးစေသည်
④ခွဲခွဲမောင်းနှင်မှုတစ်ခုယူပါ
သင့်မက်ဆေ့ချ်ကို ကျွန်ုပ်တို့ထံ ပေးပို့ပါ-
ထုတ်ကုန် အမျိုးအစားများ
-
NEMA11 ၂၈ မီလီမီတာ linear hybrid stepper မော်တာ အဖုံးမပါ...
-

၂၈ မီလီမီတာ အရွယ်အစား NEMA11 ဟိုက်ဘရစ် stepper မော်တာ ၁.၈ ဒီဂရီ...
-

မြင့်မားသောတိကျမှု 42mm stepper မော်တာ NEMA 17 hybri ...
-
လည်ပတ်မှုပါရှိသော 20mm NEMA8 linear hybrid stepper မော်တာ...
-

ဂြိုဟ်ဂီယာဘောက်စ် stepper မော်တာ 35mm (NEMA 14) ...
-

မြင့်မားသော torque NEMA 23 ဟိုက်ဘရစ် stepper မော်တာ 57mm m ...