ပြည်သူ့ကျန်းမာရေးနှင့် ဘေးကင်းရေးသည် ကျွန်ုပ်တို့၏နေ့စဉ်ဘဝတွင် ထိပ်တန်းဦးစားပေးဖြစ်သောကြောင့် အလိုအလျောက်တံခါးသော့ခလောက်များ လူကြိုက်များလာကာ ဤသော့ခလောက်များသည် ခေတ်မီသောရွေ့လျားမှုကို ထိန်းချုပ်ရန် လိုအပ်ပါသည်။ အသေးစားတိကျမှုstepper မော်တာများဤကျစ်လျစ်ပြီး ဆန်းပြားသောဒီဇိုင်းအတွက် အကောင်းဆုံးဖြေရှင်းချက်ဖြစ်သည်။ အလိုအလျောက်တံခါးသော့ခတ်ခြင်း။ဟိုတယ်နှင့် ရုံးခန်းများ ၏ စီးပွားရေးဆိုင်ရာ နေရာများတွင် စတင်ခဲ့သည်မှာ အချိန်အတော်ကြာနေပြီဖြစ်သည်။ စမတ်ဖုန်းအသုံးပြုသူဦးရေ တိုးလာခြင်းနှင့် စမတ်အိမ်နည်းပညာ ပျံ့နှံ့မှုနှင့်အတူ လူနေအိမ်ရာသို့ အလိုအလျောက် ပြောင်းလဲလာသည်။တံခါးသော့ခတ်ခြင်းလျှောက်လွှာကျော်ကြားမှုလည်း ရရှိခဲ့သည်။ ဘက်ထရီအသုံးပြုမှုနှင့် အီလက်ထရွန်းနစ်ချိတ်ဆက်မှု၊ RFID နှင့် Bluetooth နည်းပညာတို့ကဲ့သို့သော စီးပွားရေးလုပ်ငန်းသုံးနှင့် နေထိုင်သည့်အသုံးပြုသူများအကြား နည်းပညာပိုင်းဆိုင်ရာ ကွာခြားချက်များရှိသည်။

၎င်းကို ကိုယ်တိုင်လှည့်ခြင်းဖြင့် လော့ခ်ချရန်/သော့ဖွင့်ရန်အတွက် သော့ဆလင်ဒါထဲသို့ သော့ထည့်ရန် သမားရိုးကျသော့ကို လိုအပ်သည်၊ ဤနည်းလမ်း၏ အားသာချက်မှာ ၎င်းသည် အလွန်လုံခြုံသောကြောင့်ဖြစ်သည်။ လူများသည် သော့များ လွဲမှားနိုင်သည် သို့မဟုတ် ပျောက်ဆုံးသွားနိုင်ပြီး သော့ခတ်ခြင်း/သော့များ ပြောင်းလဲခြင်းလုပ်ငန်းစဉ်တွင် ကိရိယာများနှင့် ကျွမ်းကျင်မှုများ အသုံးပြုရန် လိုအပ်သည်။ အီလက်ထရွန်းနစ်သော့ခလောက်များသည် ဝင်ရောက်ထိန်းချုပ်မှုသဘောအရ ပိုမိုပြောင်းလွယ်ပြင်လွယ်ဖြစ်ပြီး မကြာခဏဆိုသလို ဆော့ဖ်ဝဲလ်မှတစ်ဆင့် အလွယ်တကူ ပြုပြင်မွမ်းမံပြင်ဆင်နိုင်ပါသည်။ အီလက်ထရွန်းနစ်သော့ခလောက်များစွာသည် လူကိုယ်တိုင်နှင့် အီလက်ထရွန်းနစ်သော့ခလောက်ထိန်းချုပ်မှုရွေးချယ်စရာများကို ပေးစွမ်းနိုင်ပြီး ပိုမိုခိုင်မာသောဖြေရှင်းချက်ပေးပါသည်။
ကျစ်လစ်သော အီလက်ထရွန်းနစ်သော့ခလောက်များအတွက် သေးငယ်သော အချင်း stepper မော်တာများသည် အရွယ်အစားကန့်သတ်ချက်များနှင့် တိကျသောနေရာချထားခြင်းဆိုင်ရာ ဖြေရှင်းချက်များအတွက် စံပြဖြစ်သည်။ မော်တော်အင်ဂျင်နီယာနှင့် မူပိုင်သံလိုက်ပြုလုပ်ခြင်းနည်းပညာများသည် လက်ရှိရရှိနိုင်သော အသေးငယ်ဆုံးအချင်း (3.4mm OD) ဖြင့် stepper motor များ ဖွံ့ဖြိုးတိုးတက်ရေးကို တွန်းအားပေးခဲ့သည်။ အကန့်အသတ်ရှိသော နေရာအတွက် ဒီဇိုင်းနှင့် ပစ္စည်းများကို အကောင်းဆုံးဖြစ်အောင် ပြုလုပ်ရန် အဆင့်မြင့် သံလိုက်နှင့် တည်ဆောက်ပုံဆိုင်ရာ ခွဲခြမ်းစိတ်ဖြာမှု နည်းပညာများကို အသုံးပြုထားသည်။ အသေးစား stepper မော်တာများအတွက် အရေးကြီးဆုံး ဆုံးဖြတ်ချက်တစ်ခုမှာ တိကျသော ကြည်လင်ပြတ်သားမှုပေါ် မူတည်၍ မော်တာ၏ ခြေလှမ်းအရှည်ဖြစ်သည်။ အသုံးအများဆုံးခြေလှမ်းအရှည်များမှာ 7.5 ဒီဂရီနှင့် 3.6 ဒီဂရီဖြစ်ပြီး တော်လှန်ရေးတစ်ခုလျှင် ခြေလှမ်း 48 နှင့် 100 နှင့် သက်ဆိုင်သော stepper motor များသည် step angle 18 degree ရှိသည်။ အဆင့်အပြည့် (2-2 အဆင့်စိတ်လှုပ်ရှားမှု) မောင်းနှင်မှုဖြင့်၊ မော်တာသည် တော်လှန်ရေးတစ်ခုလျှင် ခြေလှမ်း 20 လှည့်ကာ ဝက်အူ၏ ဘုံပေါက်သည် 0.4 မီလီမီတာဖြစ်သောကြောင့် တည်နေရာထိန်းချုပ်မှု တိကျမှုကို 0.02 မီလီမီတာ ရရှိနိုင်သည်။

Stepper မော်တာများတွင် ပိုမိုသေးငယ်သော ခြေလှမ်းထောင့်ကို ပံ့ပိုးပေးသည့် ဂီယာလျှော့ကိရိယာနှင့် ရရှိနိုင်သော ရုန်းအားကို တိုးမြင့်စေသည့် လျှော့ချဂီယာတစ်ခု ရှိနိုင်သည်။ linear motion အတွက်၊ stepper motor များကို nut မှတဆင့် screw သို့ ချိတ်ဆက်ထားပါသည် (ဤမော်တာများကို linear actuators ဟုခေါ်သည်)။ အီလက်ထရွန်းနစ်လော့ခ်သည် ဂီယာလျှော့ကိရိယာကို အသုံးပြုပါက၊ ဝက်အူကို ကြီးမားသောစောင်းဖြင့်ပင် တိကျစွာရွှေ့နိုင်သည်။
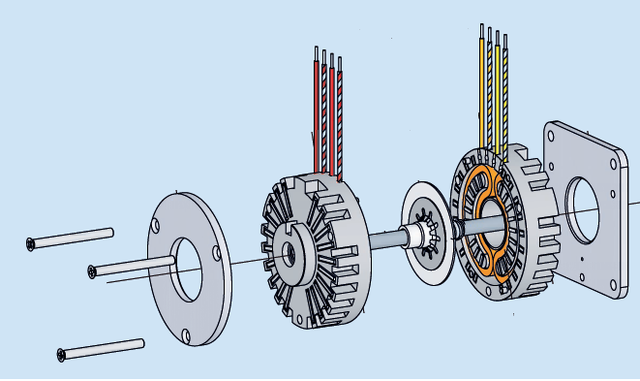
stepper motor power supply ၏ input အစိတ်အပိုင်းသည် FPC connectors များကဲ့သို့သောပုံစံအမျိုးမျိုးရှိနိုင်ပြီး၊ connector terminals များသည် PCB သို့တိုက်ရိုက်ဂဟေဆော်နိုင်ပြီး၊ output အပိုင်း၏ push rod သည် plastic slider သို့မဟုတ် metal slider ဖြစ်နိုင်သည်၊ နှင့် lock ၏ခရီးသွားလိုအပ်ချက်အရစိတ်ကြိုက် sliders အချို့ရှိသည်။ သေးငယ်သော stepper မော်တာနှင့် ပါးလွှာသော ဝက်အူများကြောင့်၊ စီမံထားသော ကြိုးအရှည်ကို ကန့်သတ်ထားပြီး လော့ခ်၏ အမြင့်ဆုံးခရီးသည် ယေဘုယျအားဖြင့် 50 မီလီမီတာထက် နည်းပါသည်။ ပုံမှန်အားဖြင့်၊ stepper motor တွင် thrust force သည် 150 မှ 300 g ခန့်ရှိသည်။ တွန်းအားသည် drive ဗို့အား၊ မော်တာခံနိုင်ရည် စသည်တို့အပေါ် မူတည်၍ ကွဲပြားသည်။
နိဂုံး
အနားသတ်နည်းပါးပြီး စိတ်အနှောက်အယှက်မဖြစ်သော ထုတ်ကုန်များကို စားသုံးသူများ၏ စိတ်ဝင်စားမှုနှင့်အတူ၊ အသေးစား stepper မော်တာများသည် ဤကျုံ့နေသောအရွယ်အစားကို လိုက်လျောညီထွေဖြစ်စေနိုင်သည်။ ကျစ်လျစ်သောပုံစံအချက်အပြင်၊ အထူးသဖြင့် တိကျသောနေရာချထားခြင်းနှင့် အော်တိုလော့ခ်ကဲ့သို့သော မြန်နှုန်းနိမ့် torque လိုအပ်ချက်များအတွက် stepper motor များသည် ထိန်းချုပ်ရန်ပိုမိုလွယ်ကူပါသည်။ တူညီသောလုပ်ဆောင်နိုင်စွမ်းကိုရရှိရန် အခြားမော်တာနည်းပညာများသည် Hall-effect အာရုံခံကိရိယာများ သို့မဟုတ် ရှုပ်ထွေးသောအနေအထားတုံ့ပြန်မှုထိန်းချုပ်မှုယန္တရားများထပ်ဖြည့်ရန်လိုအပ်သည်။ Stepper မော်တာများကို ရိုးရှင်းသော မိုက်ခရိုကွန်ထရိုလာများဖြင့် မောင်းနှင်နိုင်ပြီး၊ အလွန်ရှုပ်ထွေးလွန်းသော ဖြေရှင်းချက်များ၏ စိုးရိမ်ပူပန်မှုများကို ဒီဇိုင်းအင်ဂျင်နီယာများမှ သက်သာစေနိုင်သည်။
တင်ချိန်- နိုဝင်ဘာ ၂၅-၂၀၂၂