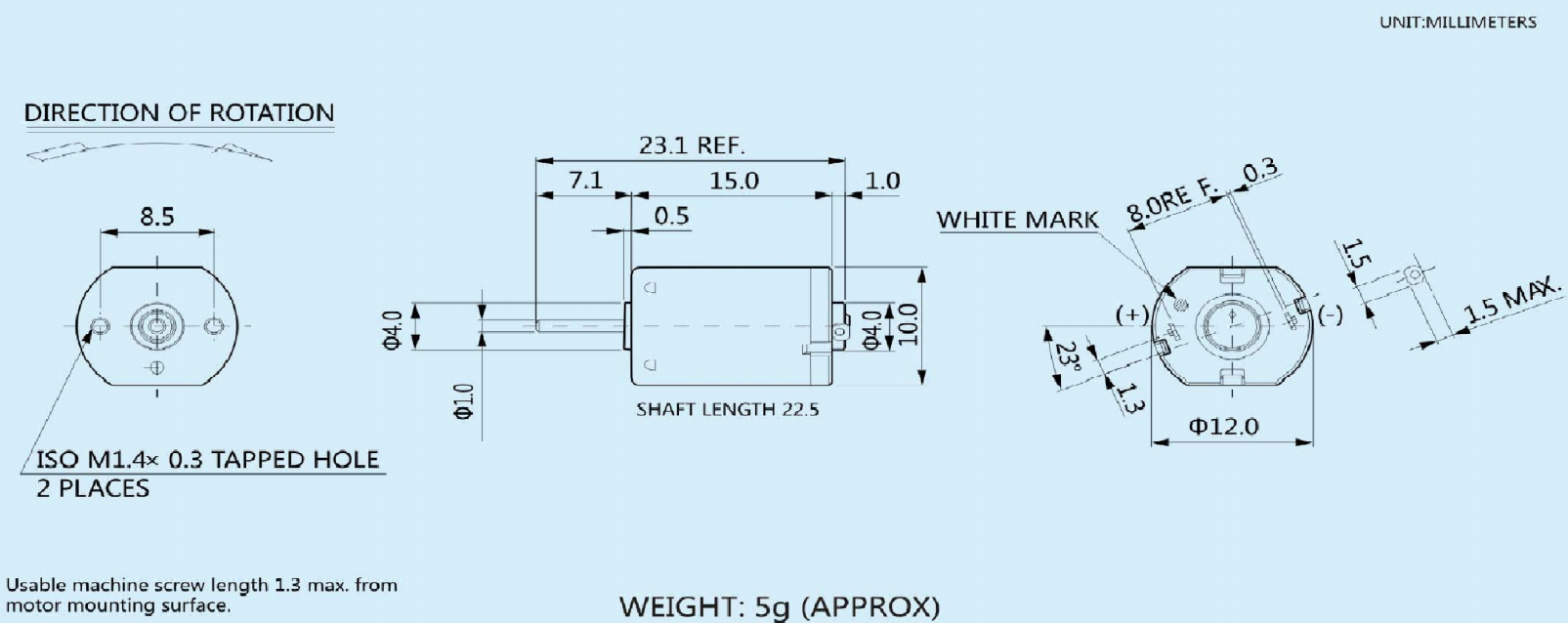
N20 DC မော်တာပုံ (N20 DC မော်တာ၏ အချင်းသည် 12 မီလီမီတာ၊ အထူ 10 မီလီမီတာ နှင့် အရှည် 15 မီလီမီတာ ရှိပြီး အရှည်ရှည်သည် N30 နှင့် အရှည်တိုသည် N10)

N20 DC မော်တာကန့်သတ်ချက်များ။
စွမ်းဆောင်ရည်:
၁။ မော်တာအမျိုးအစား: ဘရက်ရှ် DC မော်တာ
၂။ ဗို့အား: 3V-12VDC
၃။ လည်ပတ်မြန်နှုန်း (အားလပ်ချိန်): ၃၀၀၀rpm-၂၀၀၀၀rpm
၄။ လိမ်အား: ၁ ဂရမ်.စင်တီမီတာ-၂ ဂရမ်.စင်တီမီတာ
၅။ ရိုးတံအချင်း: ၁.၀ မီလီမီတာ
၆။ ဦးတည်ချက်- CW/ CCW
၇။ အထွက်ရိုးတံ ቁርት: ဆီቁርት
၈။ စိတ်ကြိုက်ပြင်ဆင်နိုင်သော ပစ္စည်းများ- ရိုးတံအရှည် (ရိုးတံတွင် အန်ကုဒ်ဒါ တပ်ဆင်ထားနိုင်သည်)၊ ဗို့အား၊ အမြန်နှုန်း၊ ဝါယာကြိုးထွက်ပေါက်နည်းလမ်းနှင့် ချိတ်ဆက်ကိရိယာ စသည်တို့။
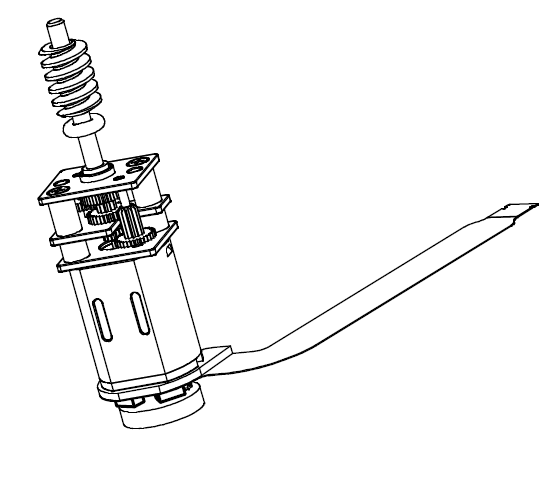
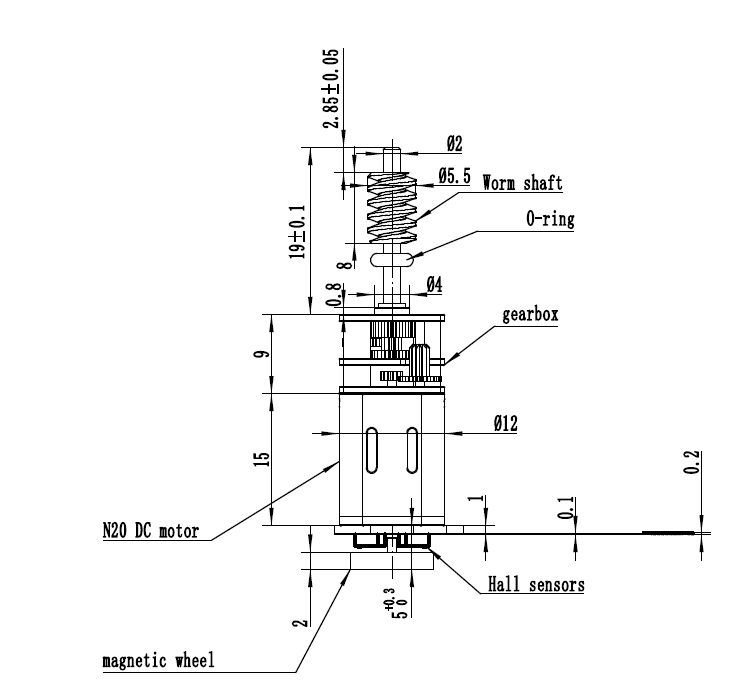
N20 DC မော်တာ စိတ်ကြိုက်ထုတ်ကုန်များ တကယ့်ဖြစ်ရပ် (Transformers)
N20 DC မော်တာ + ဂီယာဘောက်စ် + တီကောင်ရိုးတံ + အောက်ခြေအန်ကုဒ်ဒါ + စိတ်ကြိုက် FPC + ရိုးတံပေါ်ရှိ ရာဘာကွင်း
N20 DC မော်တာ စွမ်းဆောင်ရည် မျဉ်းကွေး (12V 16000 ဝန်မပါ အမြန်နှုန်း ဗားရှင်း)။
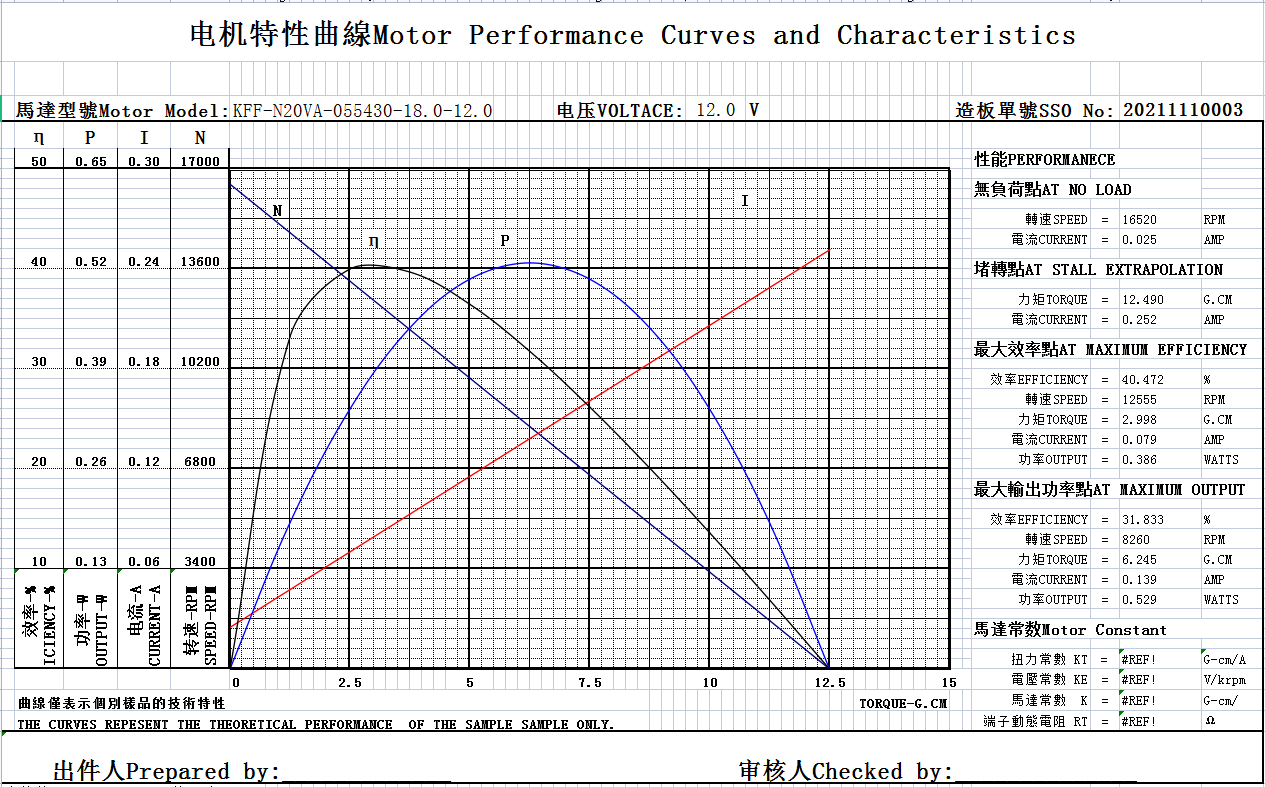
ဝိသေသလက္ခဏာများနှင့် စမ်းသပ်နည်းလမ်းများဒီစီ မော်တာ.
၁။ အဆင့်သတ်မှတ်ထားသောဗို့အားတွင်၊ အမြန်ဆုံးအမြန်နှုန်း၊ အနိမ့်ဆုံးလျှပ်စီးကြောင်းတွင်၊ ဝန်တိုးလာသည်နှင့်အမျှ၊ အမြန်နှုန်းသည် နိမ့်သည်ထက်နိမ့်လာသည်၊ လျှပ်စီးကြောင်းသည် ပိုကြီးလာသည်၊ မော်တာပိတ်ဆို့သည်အထိ၊ မော်တာအမြန်နှုန်းသည် 0 ဖြစ်သွားသည်၊ အမြင့်ဆုံးလျှပ်စီးကြောင်းဖြစ်သည်
၂။ ဗို့အားမြင့်လေ၊ မော်တာအမြန်နှုန်း ပိုမြန်လေဖြစ်သည်
အထွေထွေ ပို့ဆောင်ရေး စစ်ဆေးရေး စံနှုန်းများ။
ဝန်မပါသောအမြန်နှုန်းစမ်းသပ်မှု- ဥပမာအားဖြင့်၊ အဆင့်သတ်မှတ်ထားသောပါဝါ 12V၊ ဝန်မပါသောအမြန်နှုန်း 16000RPM။
ဝန်မပါသော စမ်းသပ်စံနှုန်းသည် 14400~17600 RPM (10% error) အကြားရှိရမည်၊ မဟုတ်ပါက ညံ့ပါသည်။
ဥပမာ- ဝန်မပါသော လျှပ်စီးကြောင်းသည် 30mA အတွင်း ရှိရမည်၊ မဟုတ်ပါက မကောင်းပါ။
သတ်မှတ်ထားသော ဝန်ကိုထည့်ပါ၊ အမြန်နှုန်းသည် သတ်မှတ်ထားသော အမြန်နှုန်းထက် မြင့်မားသင့်သည်။
ဥပမာ- 298:1 ဂီယာဘောက်စ်ပါ N20 DC မော်တာ၊ ဝန် 500g*cm ရှိပြီး RPM သည် 11500RPM အထက်ရှိရမည်။ မဟုတ်ပါက ပျက်သွားပါသည်။
N20 DC ဂီယာမော်တာ၏ တကယ့်စမ်းသပ်မှုဒေတာ။
စမ်းသပ်ရက်စွဲ: ၂၀၂၂ ခုနှစ်၊ နိုဝင်ဘာလ ၁၃ ရက်
စမ်းသပ်သူ: Tony၊ Vikotec အင်ဂျင်နီယာ
စမ်းသပ်နေရာ- Vikotec အလုပ်ရုံ
ထုတ်ကုန်: N20 DC မော်တာ + ဂီယာဘောက်စ်
စမ်းသပ်ဗို့အား: 12V
မော်တာတွင် ဝန်မပါသော အမြန်နှုန်း: 16000RPM
အသုတ်- ဒုတိယအသုတ်ကို ဇူလိုင်လတွင်
လျှော့ချရေးအချိုး: ၂၉၈:၁
ခုခံမှု: 47.8Ω
ဂီယာဘောက်စ်မပါဘဲ ဝန်မပါသောအမြန်နှုန်း: 16508RPM
ဝန်မရှိသော လက်ရှိ: 15mA
| နံပါတ်စဥ် | ဝန်မရှိသော လျှပ်စီးကြောင်း (mA) | ဝန်မပါသောအမြန်နှုန်း(RPM) | ၅၀၀ ဂရမ်*စင်တီမီတာဝန်အား လက်ရှိ (mA) | ၅၀၀ ဂရမ်*စင်တီမီတာ ဝန်အားမြန်နှုန်း(RPM) | ပိတ်ဆို့နေသော လျှပ်စီးကြောင်း(RPM) |
| ၁ | 16 | ၁၆၃၉၀ | 59 | ၁၂၈၀၀ | ၂၁၅ |
| 2 | 18 | ၁၆၂၀၀ | 67 | ၁၂၄၀၀ | ၂၃၄ |
| 3 | 18 | ၁၆၂၀၀ | 67 | ၁၂၃၈၀ | ၂၂၀ |
| 4 | 20 | ၁၆၀၈၀ | 62 | ၁၂၄၀၀ | ၂၂၈ |
| 5 | 17 | ၁၆၄၀၀ | 68 | ၁၂၄၂၀ | ၂၃၁ |
| ပျမ်းမျှတန်ဖိုး | 18 | ၁၆၂၅၄ | 65 | ၁၂၄၈၀ | ၂၂၆ |
အသုတ်- ဒုတိယအသုတ်ကို ဇူလိုင်လတွင်
အရှိန်လျှော့အချိုး: ၄၂၀:၁
ခုခံမှု: 47.8Ω
ဂီယာဘောက်စ်မပါဘဲ ဝန်မပါသောအမြန်နှုန်း:16500RPM
ဝန်မရှိသော လက်ရှိ: 15mA
| နံပါတ်စဥ် | ဝန်မရှိသော လျှပ်စီးကြောင်း (mA) | ဝန်မပါသောအမြန်နှုန်း(RPM) | ၅၀၀ ဂရမ်*စင်တီမီတာဝန်အား လက်ရှိ (mA) | ၅၀၀ ဂရမ်*စင်တီမီတာ ဝန်အားမြန်နှုန်း(RPM) | ပိတ်ဆို့နေသော လျှပ်စီးကြောင်း(RPM) |
| ၁ | 15 | ၁၆၆၈၀ | 49 | ၁၃၉၆၀ | ၂၃၁ |
| 2 | 25 | ၁၅၉၃၀ | 60 | ၁၃၂၀၀ | ၂၃၅ |
| 3 | 19 | ၁၆၀၈၀ | 57 | ၁၃၁၅၀ | ၂၃၀ |
| 4 | 21 | ၁၅၈၀၀ | 53 | ၁၃၃၀၀ | ၂၃၃ |
| 5 | 20 | ၁၆၀၀၀ | 55 | ၁၃၄၀၀ | ၂၃၈ |
| ပျမ်းမျှတန်ဖိုး | 20 | ၁၆၀၉၈ | 55 | ၁၃၄၀၂ | ၂၃၃ |
အသုတ်: တတိယအသုတ် စက်တင်ဘာလတွင်
အရှိန်လျှော့အချိုး: ၂၉၈:၁
ခုခံမှု: 47.6Ω
ဂီယာဘောက်စ်မပါဘဲ ဝန်မပါသောအမြန်နှုန်း: 15850RPM
ဝန်မရှိသော လက်ရှိ: 13mA
| နံပါတ်စဥ် | ဝန်မရှိသော လျှပ်စီးကြောင်း (mA) | ဝန်မပါသောအမြန်နှုန်း(RPM) | ၅၀၀ ဂရမ်*စင်တီမီတာဝန်အား လက်ရှိ (mA) | ၅၀၀ ဂရမ်*စင်တီမီတာ ဝန်အားမြန်နှုန်း(RPM) | ပိတ်ဆို့နေသော လျှပ်စီးကြောင်း(RPM) |
| ၁ | 16 | ၁၅၇၂၀ | 64 | ၁၂၃၅၀ | ၂၁၉ |
| 2 | 18 | ၁၅၃၉၀ | 63 | ၁၂၂၅၀ | ၂၀၀ |
| 3 | 18 | ၁၅၃၃၀ | 63 | ၁၁၉၀၀ | ၂၁၉ |
| 4 | 20 | ၁၅၂၃၀ | 62 | ၁၂၁၀၀ | ၂၁၆ |
| 5 | 18 | ၁၅၃၇၅ | 61 | ၁၂၂၅၀ | ၂၂၈ |
| ပျမ်းမျှတန်ဖိုး | 18 | ၁၅၄၀၉ | 63 | ၁၂၁၇၀ | ၂၁၆ |
အသုတ်: တတိယအသုတ် စက်တင်ဘာလတွင်
လျှော့ချရေးအချိုး: ၄၂၀:၁
ခုခံမှု: 47.6Ω
ဂီယာဘောက်စ်မပါဘဲ ဝန်မပါသောအမြန်နှုန်း: 15680RPM
ဝန်မရှိသော လက်ရှိ: 17mA
| နံပါတ်စဥ် | ဝန်မရှိသော လျှပ်စီးကြောင်း (mA) | ဝန်မပါသောအမြန်နှုန်း(RPM) | ၅၀၀ ဂရမ်*စင်တီမီတာဝန်အား လက်ရှိ (mA) | ၅၀၀ ဂရမ်*စင်တီမီတာ ဝန်အားမြန်နှုန်း(RPM) | ပိတ်ဆို့နေသော လျှပ်စီးကြောင်း(RPM) |
| ၁ | 18 | ၁၅၆၁၅ | 54 | ၁၂၉၈၀ | ၂၁၆ |
| 2 | 18 | ၁၅၄၁၈ | 49 | ၁၃၁၀၀ | ၂၁၀ |
| 3 | 18 | ၁၅၃၀၀ | 50 | ၁၂၉၉၀ | ၂၁၉ |
| 4 | 17 | ၁၅၂၇၀ | 50 | ၁၃၀၀၀ | ၂၂၂ |
| 5 | 16 | ၁၅၆၂၀ | 50 | ၁၃၁၆၀ | ၂၁၇ |
| ပျမ်းမျှတန်ဖိုး | 17 | ၁၅၄၄၅ | 51 | ၁၃၀၄၆ | ၂၁၇ |
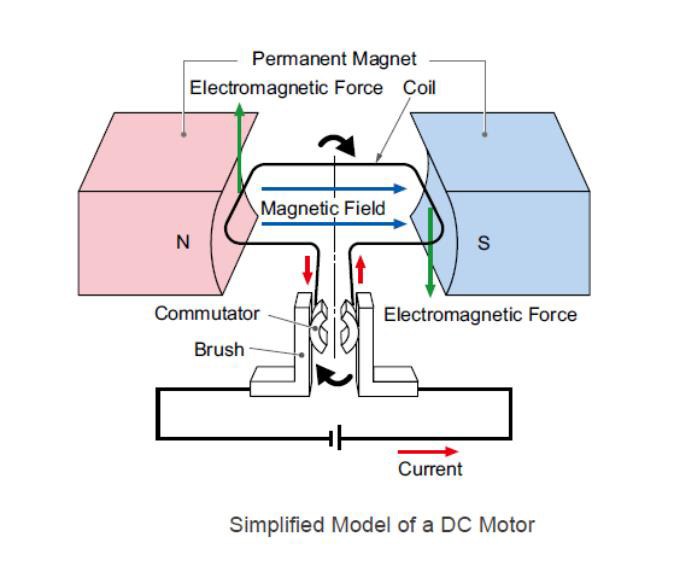
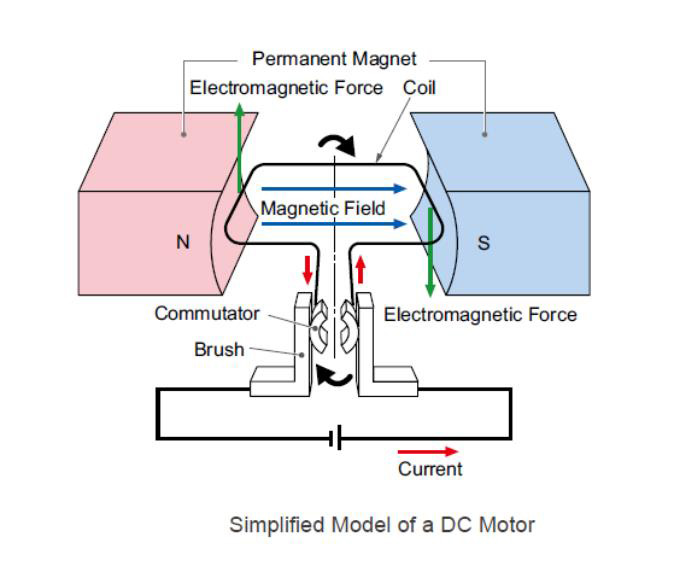
N20 DC မော်တာ၏ အလုပ်လုပ်ပုံ အခြေခံမူ။
သံလိုက်စက်ကွင်းတွင် စွမ်းအင်ပြည့်နေသော လျှပ်ကူးပစ္စည်းတစ်ခုသည် သတ်မှတ်ထားသော ဦးတည်ချက်တစ်ခုရှိ အားတစ်ခု၏ သက်ရောက်မှုကို ခံရသည်။
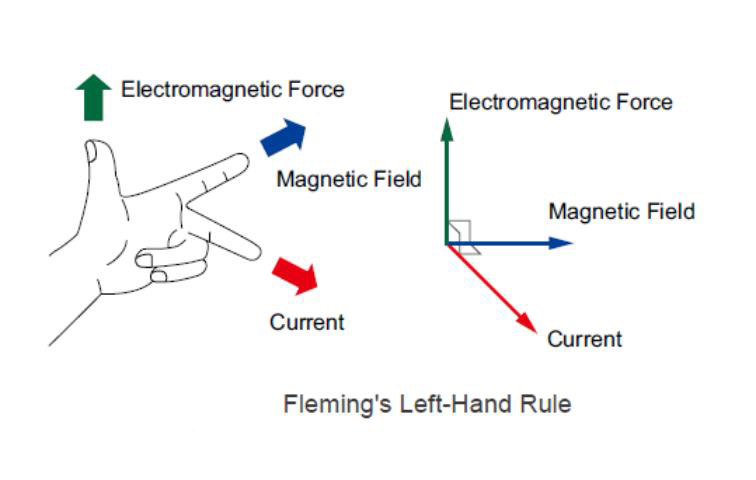
ဖလဲမင်းရဲ့ ဘယ်လက်စည်းမျဉ်း။
သံလိုက်စက်ကွင်းရဲ့ ဦးတည်ရာက လက်ညှိုး၊ လျှပ်စီးကြောင်းရဲ့ ဦးတည်ရာက လက်ခလယ်၊ အားရဲ့ ဦးတည်ရာက လက်မရဲ့ ဦးတည်ရာပါ။
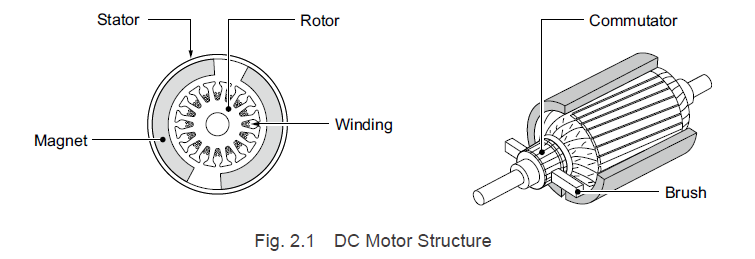
N20 DC မော်တာ၏ အတွင်းပိုင်းဖွဲ့စည်းပုံ။
DC မော်တာတွင် rotor (coil) ၏ ဦးတည်ရာကို ခွဲခြမ်းစိတ်ဖြာခြင်း၁။
လျှပ်စစ်သံလိုက်အား၏ ဦးတည်ရာကို မှီခိုအားထားလျှင်၊ ကွိုင်သည် နာရီလက်တံလည်ပတ်မှု၊ ဘယ်ဘက်ရှိ ဝါယာကြိုးသို့ သက်ရောက်သော လျှပ်စစ်သံလိုက်အား၏ ဦးတည်ရာ (အပေါ်သို့ မျက်နှာမူထားသော) နှင့် ညာဘက်ရှိ ဤဝါယာကြိုးသို့ သက်ရောက်သော လျှပ်စစ်သံလိုက်အား၏ ဦးတည်ရာ (အောက်သို့ မျက်နှာမူထားသော) တို့အတိုင်း ရွေ့လျားလိမ့်မည်။
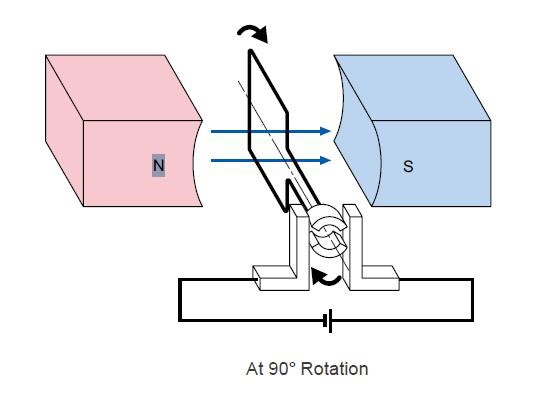
မော်တာရှိ ရိုတာ (ကွိုင်) ၏ ဦးတည်ရာကို ခွဲခြမ်းစိတ်ဖြာခြင်း၂။
ကွိုင်သည် သံလိုက်စက်ကွင်းနှင့် ထောင့်မှန်ကျနေသောအခါ၊ မော်တာသည် သံလိုက်စက်ကွင်းအားကို မရရှိပါ။ သို့သော်၊ အရှိန်အဟုန်ကြောင့် ကွိုင်သည် အနည်းငယ်အကွာအဝေးအထိ ဆက်လက်ရွေ့လျားနေမည်ဖြစ်သည်။ ဤခဏတာအတွင်း၊ commutator နှင့် brush များသည် ထိတွေ့မှုမရှိပါ။ ကွိုင်သည် နာရီလက်တံလည်ပတ်နေသောအခါ၊ commutator နှင့် brush များသည် ထိတွေ့နေပါသည်။ဤသည်က လျှပ်စီးကြောင်း၏ ဦးတည်ရာကို ပြောင်းလဲစေလိမ့်မည်။
မော်တာရှိ rotor (coil) ၏ ဦးတည်ရာကို ခွဲခြမ်းစိတ်ဖြာခြင်း ၃။
commutator နှင့် brush များကြောင့် မော်တာ၏ တစ်ဝက်လည်ပတ်တိုင်း လျှပ်စီးကြောင်းသည် ဦးတည်ရာပြောင်းသွားသည်။ ဤနည်းအားဖြင့် မော်တာသည် နာရီလက်တံလည်ပတ်မှုအတိုင်း ဆက်လက်လည်ပတ်နေမည်ဖြစ်သည်။ commutator နှင့် brush များသည် မော်တာ၏ စဉ်ဆက်မပြတ်ရွေ့လျားမှုအတွက် လိုအပ်သောကြောင့် N20 DC မော်တာကို "Brushed motor" ဟုခေါ်သည်။
ဘယ်ဘက်ရှိ ဝါယာကြိုး (အပေါ်ဘက်သို့ မျက်နှာမူထားသော) နှင့် ညာဘက်ရှိ ဝါယာကြိုးသို့ သက်ရောက်သော လျှပ်စစ်သံလိုက်အား၏ ဦးတည်ရာ
လျှပ်စစ်သံလိုက်အား၏ ဦးတည်ရာ (အောက်ဘက်သို့ မျက်နှာမူခြင်း)
N20 DC မော်တာရဲ့ အားသာချက်တွေကတော့ -
၁။ ဈေးသက်သာသည်
၂။ လည်ပတ်နှုန်းမြန်ဆန်ခြင်း
၃။ ရိုးရှင်းသောဝါယာကြိုး၊ တံသင်နှစ်ခု၊ အပြုသဘောဆောင်သောစင်မြင့်နှင့်ချိတ်ဆက်ထားသောတစ်ခု၊ အနုတ်လက္ခဏာစင်မြင့်နှင့်ချိတ်ဆက်ထားသောတစ်ခု၊ ပလပ်နှင့်ကစားခြင်း
၄။ မော်တာ၏ စွမ်းဆောင်ရည်သည် stepper မော်တာထက် ပိုမိုမြင့်မားသည်
ပို့စ်တင်ချိန်: ၂၀၂၂ ခုနှစ်၊ နိုဝင်ဘာလ ၁၆ ရက်