ပြီးနောက်စတက်ပါ မော်တာစတင်လည်ပတ်သည့်အခါတွင် အလုပ်လုပ်နေသော လျှပ်စီးကြောင်း၏ အခန်းကဏ္ဍကို တားဆီးပေးမည်ဖြစ်ပြီး၊ ဓာတ်လှေကားသည် လေထဲတွင် ဝဲနေသကဲ့သို့၊ ဤလျှပ်စီးကြောင်းသည် မော်တာကို အပူတက်စေပြီး ၎င်းသည် ပုံမှန်ဖြစ်စဉ်တစ်ခုဖြစ်သည်။
အကြောင်းရင်းတစ်ခု။
အဓိပ္ပာယ်အရှိဆုံး အားသာချက်တစ်ခုကတော့စတက်ပါ မော်တာများopen-loop စနစ်တွင် ရရှိနိုင်သော တိကျသောထိန်းချုပ်မှုဖြစ်သည်။ Open-loop ထိန်းချုပ်မှုဆိုသည်မှာ (rotor) အနေအထားနှင့်ပတ်သက်သည့် တုံ့ပြန်ချက်အချက်အလက် မလိုအပ်ပါ။
ဒီထိန်းချုပ်မှုက စျေးကြီးတဲ့ sensor တွေနဲ့ optical encoder လိုမျိုး feedback device တွေကို အသုံးပြုခြင်းကို ရှောင်ရှားပေးပါတယ်၊ ဘာလို့လဲဆိုတော့ input stepping pulse တွေကိုပဲ (rotor) ရဲ့ အနေအထားကို သိရှိဖို့ ခြေရာခံဖို့ လိုအပ်လို့ပါ။ မကြာသေးခင်က ဖောက်သည်တချို့က stepper motor တွေဟာလည်း အပူပြဿနာတွေ ကြုံတွေ့ရလွယ်တယ်ဆိုတာ ကျွန်တော်တို့ရဲ့ Shangshe motor အင်ဂျင်နီယာတွေကို ပြောပြခဲ့ကြပါတယ်၊ ဒါကြောင့် ဒီအခြေအနေကို ဘယ်လိုဖြေရှင်းရမလဲ။
၁၊ လျှော့ချပါစတက်ပါ မော်တာအပူ၊ အပူလျှော့ချခြင်းသည် ကြေးနီဆုံးရှုံးမှုနှင့် သံဆုံးရှုံးမှုကို လျှော့ချရန်ဖြစ်သည်။ ကြေးနီဆုံးရှုံးမှုကို ဦးတည်ချက်နှစ်ခုဖြင့် လျှော့ချပြီး လျှပ်စစ် yin နှင့် လျှပ်စီးကြောင်းကို လျှော့ချပေးသည်၊ ၎င်းသည် မော်တာဖြစ်သည့် two-phase stepper motor ကို parallel motor မဟုတ်ဘဲ series motor တွင် အသုံးပြုနိုင်သည့်အခါ resistance နှင့် rated current ကို တတ်နိုင်သမျှ အနည်းဆုံးရွေးချယ်ရန် လိုအပ်သော်လည်း ၎င်းသည် torque နှင့် မြန်နှုန်းမြင့်လိုအပ်ချက်များနှင့် မကြာခဏ ဆန့်ကျင်ဘက်ဖြစ်သည်။
၂။ မော်တာကို ရွေးချယ်ထားပြီးဖြစ်သောကြောင့် ဒရိုက်၏ အလိုအလျောက် တစ်ဝက်လျှပ်စီးကြောင်း ထိန်းချုပ်လုပ်ဆောင်ချက်နှင့် အော့ဖ်လိုင်းလုပ်ဆောင်ချက်ကို အပြည့်အဝအသုံးပြုသင့်ပြီး ရှေ့တစ်ခုက မော်တာအနားတွင်ရှိနေချိန်တွင် လျှပ်စီးကြောင်းကို အလိုအလျောက်လျှော့ချပေးပြီး နောက်တစ်ခုက လျှပ်စီးကြောင်းကို ဖြတ်တောက်ပေးပါသည်။
၃။ ထို့အပြင်၊ လက်ရှိလှိုင်းပုံစံသည် sinusoidal နှင့်နီးစပ်သောကြောင့် subdivision stepper မော်တာမောင်းနှင်မှု၊ harmonics နည်းပါးခြင်း၊ မော်တာအပူပေးမှုနည်းပါးခြင်း။ သံဆုံးရှုံးမှုကိုလျှော့ချရန်နည်းလမ်းအနည်းငယ်သာရှိပြီးဗို့အားအဆင့်သည်၎င်းနှင့်ဆက်စပ်နေသည်။ မြင့်မားသောဗို့အားမောင်းနှင်မှုမော်တာသည်မြန်နှုန်းမြင့်ဝိသေသလက္ခဏာများကိုတိုးမြှင့်ပေးသော်လည်းအပူထုတ်လုပ်မှုကိုတိုးမြှင့်ပေးလိမ့်မည်။
၄။ မြင့်မားသော band၊ ချောမွေ့မှုနှင့် အပူ၊ ဆူညံသံနှင့် အခြားညွှန်းကိန်းများကို ထည့်သွင်းစဉ်းစား၍ သင့်လျော်သော drive motor voltage level ကို ရွေးချယ်သင့်သည်။
အကြောင်းရင်းနှစ်။
Stepper မော်တာရဲ့ အပူဟာ ယေဘုယျအားဖြင့် မော်တာရဲ့ သက်တမ်းကို မထိခိုက်ပေမယ့် ဖောက်သည်အများစုအတွက် အာရုံစိုက်ဖို့ မလိုအပ်ပါဘူး။ ဒါပေမယ့် အလေးအနက်ထားရမယ့် အနုတ်လက္ခဏာဆောင်တဲ့ အကျိုးသက်ရောက်မှုတွေ ရှိပါတယ်။ ဥပမာ stepper မော်တာရဲ့ အတွင်းပိုင်း အပူချဲ့ထွင်မှုကိန်းလိုမျိုး အစိတ်အပိုင်းတစ်ခုချင်းစီရဲ့ မတူညီသော ဖွဲ့စည်းပုံဆိုင်ရာ ဖိအားပြောင်းလဲမှုတွေနဲ့ အတွင်းပိုင်းလေကွာဟချက်မှာ သေးငယ်တဲ့ ပြောင်းလဲမှုတွေက stepper မော်တာရဲ့ ဒိုင်းနမစ်တုံ့ပြန်မှုကို ထိခိုက်စေမှာဖြစ်ပြီး မြန်နှုန်းမြင့်ရင် ခြေလှမ်းတွေ ဆုံးရှုံးလွယ်ပါလိမ့်မယ်။ နောက်ထပ် ဥပမာတစ်ခုကတော့ ဆေးဘက်ဆိုင်ရာ စက်ပစ္စည်းတွေနဲ့ တိကျမှုမြင့်မားတဲ့ စမ်းသပ်ကိရိယာတွေလိုမျိုး stepper မော်တာတွေရဲ့ အပူလွန်ကဲမှုကို အချို့သော အခြေအနေတွေမှာ ခွင့်မပြုပါဘူး။ ဒါကြောင့် stepper မော်တာရဲ့ အပူကို ထိန်းချုပ်ဖို့ လိုအပ်သင့်ပါတယ်။ မော်တာရဲ့ အပူဟာ ဒီအချက်တွေကြောင့် ဖြစ်ပေါ်လာတာပါ။
၁။ ဒရိုင်ဘာမှ သတ်မှတ်ထားသော လျှပ်စီးကြောင်းသည် မော်တာ၏ သတ်မှတ်ထားသော လျှပ်စီးကြောင်းထက် ပိုကြီးသည်
၂။ မော်တာရဲ့ အမြန်နှုန်းက အရမ်းမြန်နေတယ်
၃။ မော်တာကိုယ်တိုင်က အရှိန်ပြင်းပြင်းနဲ့ လှည့်ပတ်အား မြင့်မားတာကြောင့် အလယ်အလတ်အမြန်နှုန်းနဲ့ လည်ပတ်ရင်တောင် ပူနေပေမယ့် မော်တာရဲ့ သက်တမ်းကို မထိခိုက်ပါဘူး။ မော်တာရဲ့ သံလိုက်အား လျှော့ချပေးတဲ့အမှတ်က ၁၃၀-၂၀၀ ဒီဂရီစင်တီဂရိတ်မှာ ရှိတာကြောင့် မော်တာ ၇၀-၉၀ ဒီဂရီစင်တီဂရိတ်မှာ ပုံမှန်ဖြစ်စဉ်တစ်ခုဖြစ်ပြီး ၁၃၀ ဒီဂရီစင်တီဂရိတ်အောက်ဆိုရင် ပြဿနာမရှိပါဘူး။ အပူလွန်ကဲနေတယ်လို့ ခံစားရရင် မော်တာရဲ့ လျှပ်စီးကြောင်းကို သတ်မှတ်ထားတဲ့ မော်တာရဲ့ လျှပ်စီးကြောင်း ဒါမှမဟုတ် မော်တာအမြန်နှုန်းရဲ့ ၇၀% လောက်မှာ လျှော့ချဖို့ သတ်မှတ်ထားပါတယ်။
အကြောင်းရင်းသုံး။
Stepper motor ကို digital actuating element အနေနဲ့ motion control system မှာ ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုခဲ့ကြပါတယ်။ stepper motor တွေအသုံးပြုတဲ့ user တွေနဲ့ သူငယ်ချင်းတော်တော်များများက motor က အပူများတယ်လို့ ခံစားရပြီး သံသယဝင်တတ်ကြပါတယ်၊ ဒီဖြစ်စဉ်က ပုံမှန်ဖြစ်မဖြစ် မသိကြပါဘူး။ တကယ်တော့ အပူဆိုတာ stepper motor တွေမှာ အဖြစ်များတဲ့ဖြစ်စဉ်တစ်ခုပါ၊ ဒါပေမယ့် အပူဘယ်လောက်ကို ပုံမှန်လို့ သတ်မှတ်လဲ၊ stepper motor ရဲ့ အပူကို ဘယ်လိုလျှော့ချရမလဲ။
အောက်ပါတို့သည် ရိုးရှင်းသော အမျိုးအစားခွဲခြားမှုအချို့ကို ပြုလုပ်ထားပြီး၊ မျှော်လင့်ထားသည့်အတိုင်း လက်တွေ့အသုံးချမှုများ၏ တကယ့်လုပ်ငန်းခွင်တွင် အသုံးချနိုင်ပါသည်။
၁။ မော်တာအပူပေးမှုနိယာမ
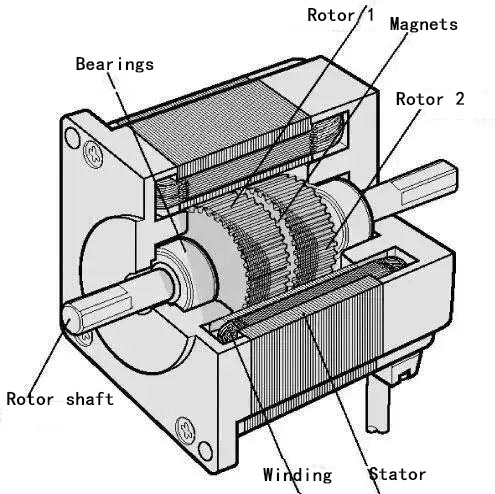
ကျွန်ုပ်တို့သည် မော်တာအမျိုးအစားအားလုံးကို တွေ့မြင်ရလေ့ရှိပြီး အတွင်းပိုင်းအူတိုင်နှင့် လှည့်ပတ်ကွိုင်တို့ဖြစ်သည်။ လှည့်ပတ်မှုတွင် ခုခံမှုရှိပြီး၊ စွမ်းအင်ပေးခြင်းဖြင့် ဆုံးရှုံးမှုကို ဖြစ်ပေါ်စေပြီး၊ ဆုံးရှုံးမှုနှင့် ခုခံမှုပမာဏနှင့် လျှပ်စီးကြောင်း နှစ်ထပ်ကိန်းသည် ဆုံးရှုံးမှုနှင့် အချိုးကျသည်။ ၎င်းကို ကြေးနီဆုံးရှုံးမှုဟု ခေါ်ဆိုလေ့ရှိပြီး၊ လျှပ်စီးကြောင်းသည် စံ DC သို့မဟုတ် sine wave မဟုတ်ပါက harmonic ဆုံးရှုံးမှုလည်း ပါဝင်သည်။ အူတိုင်တွင် hysteresis eddy current effect ရှိပြီး၊ alternating magnetic field တွင် ဆုံးရှုံးမှုကိုလည်း ဖြစ်ပေါ်စေမည်ဖြစ်ပြီး၊ ပစ္စည်း၏အရွယ်အစား၊ လျှပ်စီးကြောင်း၊ ကြိမ်နှုန်း၊ ဗို့အားတို့ကို ဖြစ်ပေါ်စေပြီး ၎င်းကို သံဆုံးရှုံးမှုဟုခေါ်သည်။ ကြေးနီဆုံးရှုံးမှုနှင့် သံဆုံးရှုံးမှုသည် အပူပုံစံဖြင့် ပေါ်လာမည်ဖြစ်ပြီး မော်တာ၏ စွမ်းဆောင်ရည်ကို ထိခိုက်စေမည်ဖြစ်သည်။ Stepper မော်တာများသည် ယေဘုယျအားဖြင့် တည်နေရာတိကျမှုနှင့် torque output ကို လိုက်စားပြီး စွမ်းဆောင်ရည်မှာ အတော်လေးနိမ့်ပြီး လျှပ်စီးကြောင်းမှာ ယေဘုယျအားဖြင့် ကြီးမားပြီး harmonic အစိတ်အပိုင်းများ မြင့်မားသောကြောင့် လျှပ်စီးကြောင်း လှည့်ပတ်မှု၏ ကြိမ်နှုန်းသည် အမြန်နှုန်းနှင့်အတူ ကွဲပြားသောကြောင့် stepper မော်တာများသည် ယေဘုယျအားဖြင့် အပူရှိပြီး အခြေအနေသည် ယေဘုယျ AC မော်တာထက် ပိုမိုဆိုးရွားသည်။
2 stepper မော်တာ အပူချိန် သင့်တင့်သော အကွာအဝေး
မော်တာအပူထုတ်လုပ်မှုကို ခွင့်ပြုထားသည့်အတိုင်းအတာသည် မော်တာ၏ အတွင်းပိုင်းလျှပ်ကာအဆင့်ပေါ်တွင် များစွာမူတည်ပါသည်။ အတွင်းပိုင်းလျှပ်ကာသည် မြင့်မားသောအပူချိန် (၁၃၀ ဒီဂရီအထက်) တွင်သာ ပျက်စီးသွားမည်ဖြစ်သည်။ ထို့ကြောင့် အတွင်းပိုင်းအပူချိန် ၁၃၀ ဒီဂရီထက် မကျော်လွန်သရွေ့ မော်တာသည် လက်စွပ်ကို မပျက်စီးစေဘဲ မျက်နှာပြင်အပူချိန်သည် ထိုအချိန်တွင် ၉၀ ဒီဂရီအောက် ရှိနေမည်ဖြစ်သည်။ ထို့ကြောင့် stepper မော်တာ၏ မျက်နှာပြင်အပူချိန် ၇၀-၈၀ ဒီဂရီသည် ပုံမှန်ဖြစ်သည်။ ရိုးရှင်းသော အပူချိန်တိုင်းတာနည်းသည် အသုံးဝင်သော point thermometer ဖြစ်သောကြောင့် သင်သည် အကြမ်းဖျင်းဆုံးဖြတ်နိုင်သည်- လက်ဖြင့် ၁-၂ စက္ကန့်ထက်ပို၍ ထိနိုင်သည်၊ ၆၀ ဒီဂရီထက် မပိုစေရ။ လက်ဖြင့်သာ ထိနိုင်သည်၊ ၇၀-၈၀ ဒီဂရီခန့်၊ ရေစက်အနည်းငယ်သည် အမြန်အငွေ့ပျံသွားလျှင် ၉၀ ဒီဂရီထက်ပိုသည်။
မြန်နှုန်းပြောင်းလဲမှုဖြင့် 3 stepper မော်တာအပူပေးစနစ်
စဉ်ဆက်မပြတ်လျှပ်စီးကြောင်းမောင်းနှင်မှုနည်းပညာကိုအသုံးပြုသောအခါ၊ stepper မော်တာသည် static နှင့် low speed တွင်ရှိနေသောအခါ၊ လျှပ်စီးကြောင်းသည် torque output ကိုထိန်းသိမ်းရန် ကိန်းသေရှိနေမည်ဖြစ်သည်။ မြန်နှုန်းသည် အတိုင်းအတာတစ်ခုအထိမြင့်မားသောအခါ၊ မော်တာ၏ internal counter potential မြင့်တက်လာပြီး လျှပ်စီးကြောင်းသည် တဖြည်းဖြည်းကျဆင်းသွားပြီး torque လည်းကျဆင်းသွားမည်ဖြစ်သည်။ ထို့ကြောင့်၊ ကြေးနီဆုံးရှုံးမှုကြောင့်အပူပေးသည့်အခြေအနေသည် မြန်နှုန်းပေါ်မူတည်လိမ့်မည်။ static နှင့် low speed သည် ယေဘုယျအားဖြင့် အပူမြင့်မားစေပြီး မြန်နှုန်းမြင့်သည် အပူနည်းပါးစေသည်။ သို့သော် သံဆုံးရှုံးမှု (အချိုးအစားသေးငယ်သော်လည်း) ပြောင်းလဲမှုများသည် အတူတူပင်မဟုတ်ပါ၊ မော်တာတစ်ခုလုံး၏အပူသည် နှစ်ခုပေါင်းခြင်းဖြစ်သောကြောင့် အထက်ဖော်ပြပါအခြေအနေသည် ယေဘုယျအခြေအနေသာဖြစ်သည်။
၄။ ထိခိုက်မှုကြောင့် ဖြစ်ပေါ်လာသော အပူ
မော်တာအပူသည် ယေဘုယျအားဖြင့် မော်တာ၏သက်တမ်းကို မထိခိုက်စေသော်လည်း၊ ဖောက်သည်အများစုသည် အာရုံစိုက်ရန်မလိုအပ်ပါ။ သို့သော် အလေးအနက်ထား၍ အပျက်သဘောဆောင်သော သက်ရောက်မှုအချို့ကို ယူဆောင်လာပါလိမ့်မည်။ မော်တာ၏ အတွင်းပိုင်းအစိတ်အပိုင်းများ၏ အပူချိန်ချဲ့ထွင်မှုကိန်းဂဏန်းအမျိုးမျိုးသည် ဖွဲ့စည်းပုံဆိုင်ရာဖိစီးမှုပြောင်းလဲမှုများနှင့် အတွင်းပိုင်းလေကွာဟချက်တွင် အနည်းငယ်ပြောင်းလဲမှုများကို ဖြစ်ပေါ်စေပြီး မော်တာ၏ ဒိုင်းနမစ်တုံ့ပြန်မှုကို ထိခိုက်စေမည်ဖြစ်ပြီး၊ မြန်နှုန်းမြင့်သည် အရှိန်လျော့ရန်လွယ်ကူလိမ့်မည်။ နောက်ထပ်ဥပမာတစ်ခုမှာ ဆေးဘက်ဆိုင်ရာပစ္စည်းကိရိယာများနှင့် မြင့်မားသောတိကျမှုရှိသော စမ်းသပ်ကိရိယာများကဲ့သို့သော အချို့သောအခြေအနေများတွင် မော်တာ၏အပူလွန်ကဲမှုကို ခွင့်မပြုပါ။ ထို့ကြောင့်၊ မော်တာ၏အပူထုတ်လုပ်မှုကို လိုအပ်သလို ထိန်းချုပ်သင့်သည်။
၅။ မော်တာရဲ့ အပူကို ဘယ်လိုလျှော့ချမလဲ။
အပူထုတ်လုပ်မှုကို လျှော့ချခြင်းသည် ကြေးနီဆုံးရှုံးမှုနှင့် သံဆုံးရှုံးမှုကို လျှော့ချရန်ဖြစ်သည်။ ကြေးနီဆုံးရှုံးမှုကို နှစ်လမ်းသွားဖြင့် လျှော့ချခြင်း၊ ခုခံမှုနှင့် လျှပ်စီးကြောင်းကို လျှော့ချခြင်း၊ မော်တာဖြစ်သည့် နှစ်ဆင့်မော်တာသည် parallel မော်တာမပါဘဲ series တွင် မော်တာကို အသုံးပြုသည့်အခါ ခုခံမှုနည်းပါးခြင်းနှင့် အဆင့်သတ်မှတ်ထားသော လျှပ်စီးကြောင်းကို တတ်နိုင်သမျှ အနည်းဆုံးရွေးချယ်ရန် လိုအပ်ပါသည်။ သို့သော် ၎င်းသည် torque နှင့် မြန်နှုန်းမြင့်လိုအပ်ချက်များနှင့် မကြာခဏ ဆန့်ကျင်ဘက်ဖြစ်နေတတ်သည်။ ရွေးချယ်ထားသော မော်တာအတွက်၊ drive ၏ automatic half-current control function နှင့် offline function ကို အပြည့်အဝအသုံးပြုသင့်ပြီး၊ ရှေ့ပိုင်းသည် မော်တာအနားယူနေချိန်တွင် လျှပ်စီးကြောင်းကို အလိုအလျောက်လျှော့ချပေးပြီး နောက်ပိုင်းသည် လျှပ်စီးကြောင်းကို ဖြတ်တောက်ပေးပါသည်။ ထို့အပြင်၊ subdivision drive သည် လျှပ်စီးကြောင်းလှိုင်းပုံစံသည် sinusoidal နှင့်နီးစပ်သောကြောင့် harmonics နည်းပါးသောကြောင့် မော်တာအပူပေးမှုလည်း နည်းပါးမည်ဖြစ်သည်။ သံဆုံးရှုံးမှုကို လျှော့ချရန် နည်းလမ်းအနည်းငယ်သာရှိပြီး ဗို့အားအဆင့်သည် ၎င်းနှင့်ဆက်စပ်နေသည်။ ဗို့အားမြင့်မားသော မော်တာသည် မြန်နှုန်းမြင့်ဝိသေသလက္ခဏာများကို တိုးမြှင့်ပေးသော်လည်း အပူထုတ်လုပ်မှုကိုလည်း တိုးမြှင့်ပေးပါသည်။ ထို့ကြောင့် မြန်နှုန်းမြင့်၊ ချောမွေ့မှုနှင့် အပူ၊ ဆူညံသံနှင့် အခြားညွှန်ပြချက်များကို ထည့်သွင်းစဉ်းစား၍ သင့်လျော်သော drive ဗို့အားအဆင့်ကို ရွေးချယ်သင့်သည်။
stepper မော်တာအမျိုးအစားအားလုံးအတွက် အတွင်းပိုင်းကို သံအူတိုင်နှင့် လှည့်ပတ်ကွိုင်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ လှည့်ပတ်မှုတွင် ခုခံမှုရှိပြီး၊ စွမ်းအင်ပေးခြင်းဖြင့် ဆုံးရှုံးမှုဖြစ်ပေါ်စေပြီး၊ ဆုံးရှုံးမှုပမာဏသည် ခုခံမှုနှင့် လျှပ်စီးကြောင်း၏ နှစ်ထပ်ကိန်းနှင့် အချိုးကျပြီး၊ ၎င်းကို ကြေးနီဥက္ကာပျံဟု ခေါ်ဆိုလေ့ရှိပြီး၊ လျှပ်စီးကြောင်းသည် စံ DC သို့မဟုတ် sine wave မဟုတ်ပါက၊ harmonic loss လည်းပါဝင်ပါက၊ core တွင် hysteresis eddy current effect ရှိပြီး၊ alternating magnetic field တွင် ဆုံးရှုံးမှုကိုလည်း ဖြစ်ပေါ်စေပြီး၊ ပစ္စည်း၏ အရွယ်အစား၊ လျှပ်စီးကြောင်း၊ ကြိမ်နှုန်း၊ ဗို့အားတို့ကို ဖြစ်ပေါ်စေပြီး၊ ၎င်းကို သံဆုံးရှုံးမှုဟုခေါ်သည်။ ကြေးနီဆုံးရှုံးမှုနှင့် သံဆုံးရှုံးမှုသည် အပူပုံစံဖြင့် ပေါ်လာမည်ဖြစ်ပြီး၊ ထို့ကြောင့် မော်တာ၏ စွမ်းဆောင်ရည်ကို ထိခိုက်စေပါသည်။ stepper မော်တာများသည် ယေဘုယျအားဖြင့် တည်နေရာတိကျမှုနှင့် torque output ကို လိုက်စားပြီး၊ စွမ်းဆောင်ရည်မှာ အတော်လေးနိမ့်ပြီး၊ လျှပ်စီးကြောင်းမှာ ယေဘုယျအားဖြင့် အတော်လေးကြီးမားပြီး၊ harmonic အစိတ်အပိုင်းများ မြင့်မားသောကြောင့်၊ လျှပ်စီးကြောင်း လှည့်ပတ်မှု၏ ကြိမ်နှုန်းသည် အမြန်နှုန်းနှင့်အတူ ကွဲပြားသောကြောင့်၊ stepper မော်တာများတွင် ယေဘုယျအားဖြင့် အပူရှိပြီး၊ အခြေအနေသည် ယေဘုယျ AC မော်တာထက် ပိုမိုဆိုးရွားပါသည်။
ပို့စ်တင်ချိန်: ၂၀၂၂ ခုနှစ်၊ နိုဝင်ဘာလ ၁၆ ရက်