ပိတ်ထားသော ကွင်းဆက်စတက်ပါ မော်တာများရွေ့လျားမှုထိန်းချုပ်မှုအသုံးချမှုများစွာတွင် စွမ်းဆောင်ရည်နှင့်ကုန်ကျစရိတ်အချိုးကို ပြောင်းလဲစေခဲ့သည်။ VIC closed-loop progressive မော်တာများ၏ အောင်မြင်မှုသည် စျေးကြီးသော servo မော်တာများကို ဈေးနှုန်းသက်သာသော မော်တာများဖြင့် အစားထိုးရန် အလားအလာကိုလည်း ဖွင့်လှစ်ပေးခဲ့သည်။စတက်ပါ မော်တာများမြင့်မားသောစံနှုန်းရှိသော စက်မှုလုပ်ငန်းအလိုအလျောက်အသုံးချမှုများ တိုးပွားလာနေသည်တွင်၊ နည်းပညာတိုးတက်မှုများသည် stepper မော်တာများနှင့် servo မော်တာများအကြား စွမ်းဆောင်ရည်နှင့် ကုန်ကျစရိတ်အချိုးကို ပြောင်းလဲစေပါသည်။
Stepper မော်တာများနှင့် servo မော်တာများ
ရိုးရာအယူအဆအရ servo control စနစ်များသည် 800 RPM ထက်ပိုသော အမြန်နှုန်းနှင့် မြင့်မားသော dynamic response လိုအပ်သည့် application များတွင် ပိုမိုကောင်းမွန်စွာ လုပ်ဆောင်ပါသည်။ Stepper motor များသည် အမြန်နှုန်းနိမ့်ခြင်း၊ အနိမ့်မှ အလယ်အလတ် အရှိန်နှင့် မြင့်မားသော holding torque ရှိသော application များအတွက် ပိုမိုသင့်လျော်ပါသည်။
ဒါဆိုရင် stepper motor တွေနဲ့ servo motor တွေအကြောင်း ရိုးရာအတွေးအခေါ်ရဲ့ အခြေခံက ဘာလဲ။ အောက်မှာ အသေးစိတ် ခွဲခြမ်းစိတ်ဖြာကြည့်ရအောင်။
၁။ ရိုးရှင်းမှုနှင့် ကုန်ကျစရိတ်
Stepper မော်တာများသည် servo မော်တာများထက် စျေးသက်သာရုံသာမက လည်ပတ်ရန်နှင့် ထိန်းသိမ်းရန်လည်း ပိုမိုလွယ်ကူပါသည်။ Stepper မော်တာများသည် ရပ်နေချိန်တွင် တည်ငြိမ်ပြီး ၎င်းတို့၏ အနေအထားကို ထိန်းသိမ်းထားသည် (dynamic load များတွင်ပင်)။ သို့သော် အချို့သော အသုံးချမှုများအတွက် ပိုမိုမြင့်မားသော စွမ်းဆောင်ရည် လိုအပ်ပါက ပိုမိုစျေးကြီးပြီး ရှုပ်ထွေးသော servo မော်တာများကို အသုံးပြုရမည်။
၂။ ဖွဲ့စည်းပုံ
စတက်ပါ မော်တာများသံလိုက်ကွိုင်များကို အသုံးပြု၍ တစ်နေရာမှ နောက်တစ်နေရာကို သံလိုက်ကို တဖြည်းဖြည်းဆွဲယူကာ အဆင့်ဆင့်လှည့်ပါ။ မော်တာကို မည်သည့်ဦးတည်ချက်သို့မဆို တည်နေရာ ၁၀၀ ရွှေ့ရန်အတွက် ဆားကစ်တွင် မော်တာပေါ်တွင် ခြေလှမ်း ၁၀၀ လုပ်ဆောင်ချက်များ လိုအပ်သည်။ Stepper မော်တာများသည် တိုးတိုးလှုပ်ရှားမှုများရရှိရန် pulses များကို အသုံးပြုပြီး feedback sensor များ မသုံးဘဲ တိကျသော နေရာချထားမှုကို ခွင့်ပြုသည်။
ဆာဗိုမော်တာ၏ ရွေ့လျားမှုနည်းလမ်းမှာ ကွဲပြားပါသည်။ ၎င်းသည် position sensor - ဆိုလိုသည်မှာ encoder - ကို magnetic rotor နှင့် ချိတ်ဆက်ပြီး မော်တာ၏ တိကျသော အနေအထားကို အဆက်မပြတ် ထောက်လှမ်းပါသည်။ ဆာဗိုသည် မော်တာ၏ တကယ့်အနေအထားနှင့် အမိန့်ပေးထားသော အနေအထားကြား ကွာခြားချက်ကို စောင့်ကြည့်ပြီး လျှပ်စီးကြောင်းကို လိုက်လျောညီထွေ ချိန်ညှိပေးပါသည်။ ဤ closed-loop စနစ်သည် မော်တာကို မှန်ကန်သော ရွေ့လျားမှုအခြေအနေတွင် ရှိနေစေရန် ထိန်းသိမ်းပေးပါသည်။

၃။ အမြန်နှုန်းနှင့် torque
stepper နှင့် servo မော်တာများအကြား စွမ်းဆောင်ရည် ကွာခြားချက်မှာ ၎င်းတို့၏ မော်တာဒီဇိုင်း ဖြေရှင်းချက်များ ကွဲပြားခြင်းကြောင့် ဖြစ်သည်။စတက်ပါ မော်တာများservo motor များထက် pole အရေအတွက် များစွာပိုများသောကြောင့် stepper motor ၏ အပြည့်အဝလည်ပတ်မှုတွင် winding current လဲလှယ်မှုများစွာ လိုအပ်ပြီး မြန်နှုန်းမြင့်လာသည်နှင့်အမျှ torque လျင်မြန်စွာကျဆင်းစေသည်။ ထို့အပြင်၊ အမြင့်ဆုံး torque ရောက်ရှိပါက stepper motor သည် ၎င်း၏ speed synchronization function ကို ဆုံးရှုံးနိုင်သည်။ ဤအကြောင်းများကြောင့် servo motor များသည် မြန်နှုန်းမြင့်အသုံးချမှုအများစုတွင် ဦးစားပေးဖြေရှင်းချက်ဖြစ်သည်။ ဆန့်ကျင်ဘက်အားဖြင့်၊ stepper motor တွင် အရွယ်အစားတူ servo motor ထက် torque အားသာချက်ရှိသောအခါ stepper motor ၏ pole အရေအတွက် မြင့်မားခြင်းသည် မြန်နှုန်းနိမ့်သောအခါတွင် အကျိုးရှိသည်။
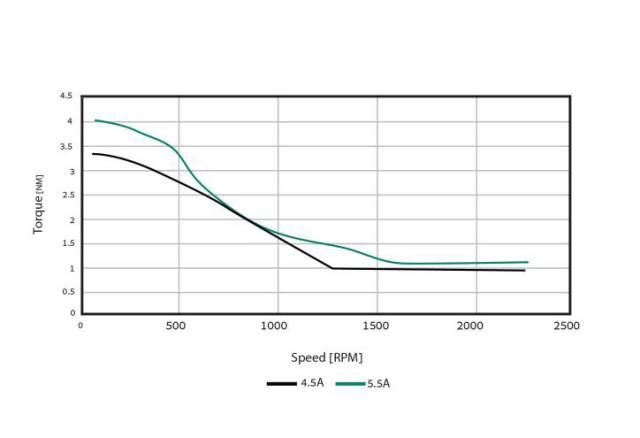
မြန်နှုန်းမြင့်လာတာနဲ့အမျှ stepper motor ရဲ့ torque လျော့ကျသွားပါတယ်
၄။ နေရာချထားခြင်း
စက်၏ တိကျသောအနေအထားကို အချိန်တိုင်းသိရှိရန်လိုအပ်သည့် အသုံးချမှုများတွင် stepper motor များနှင့် servo motor များအကြား အရေးကြီးသော ကွာခြားချက်များရှိပါသည်။ stepper motor များဖြင့် ထိန်းချုပ်ထားသော open-loop motion application များတွင်၊ control system သည် မော်တာသည် အမြဲတမ်း မှန်ကန်သော ရွေ့လျားမှုအခြေအနေတွင် ရှိနေသည်ဟု ယူဆပါသည်။ သို့သော်၊ အစိတ်အပိုင်းတစ်ခု ပိတ်ဆို့နေခြင်းကြောင့် မော်တာရပ်တန့်သွားခြင်းကဲ့သို့သော ပြဿနာတစ်ခု ကြုံတွေ့ရပြီးနောက်၊ controller သည် စက်၏ တကယ့်အနေအထားကို မသိရှိနိုင်ဘဲ၊ ၎င်းသည် အနေအထား ဆုံးရှုံးသွားနိုင်သည်။ servo motor ၏ closed-loop system တွင် အားသာချက်တစ်ခုရှိသည်- အရာဝတ္ထုတစ်ခုကြောင့် ပိတ်ဆို့နေပါက ၎င်းကို ချက်ချင်းသိရှိနိုင်သည်။ စက်သည် လည်ပတ်မှုရပ်တန့်သွားပြီး ဘယ်တော့မှ အနေအထားမှ လွဲသွားမည်မဟုတ်ပါ။
၅။ အပူနှင့် စွမ်းအင်သုံးစွဲမှု
Open-loop stepper မော်တာများသည် ပုံသေလျှပ်စီးကြောင်းကို အသုံးပြုပြီး အပူများစွာထုတ်ပေးသည်။ Closed-loop ထိန်းချုပ်မှုသည် speed loop အတွက် လိုအပ်သော လျှပ်စီးကြောင်းကိုသာ ထောက်ပံ့ပေးသောကြောင့် မော်တာအပူပေးသည့်ပြဿနာကို ရှောင်ရှားနိုင်သည်။
နှိုင်းယှဉ်ချက်အကျဉ်းချုပ်
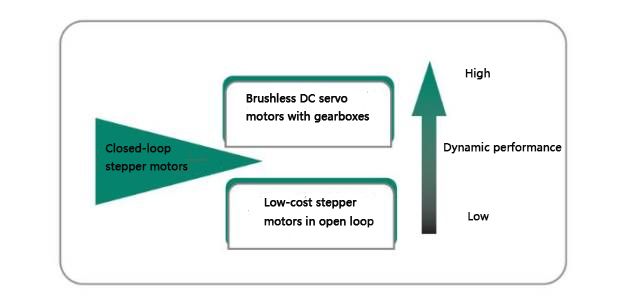
Servo ထိန်းချုပ်မှုစနစ်များသည် ရိုဘော့လက်များကဲ့သို့သော ဒိုင်းနမစ်ဝန်ပြောင်းလဲမှုများပါဝင်သည့် မြန်နှုန်းမြင့်အသုံးချမှုများအတွက် အသင့်တော်ဆုံးဖြစ်သည်။ အခြားတစ်ဖက်တွင်၊ Stepper ထိန်းချုပ်မှုစနစ်များသည် 3D ပရင်တာများ၊ conveyor များ၊ sub axes များကဲ့သို့သော အနိမ့်မှအလယ်အလတ်အရှိန်နှင့် မြင့်မားသောကိုင်ဆောင်မှု torque လိုအပ်သော အသုံးချမှုများအတွက် ပိုမိုသင့်လျော်သည်။ stepper မော်တာများသည် စျေးသက်သာသောကြောင့် ၎င်းတို့ကိုအသုံးပြုသောအခါ အလိုအလျောက်စနစ်များ၏ကုန်ကျစရိတ်ကို လျှော့ချနိုင်သည်။ servo မော်တာများ၏ဝိသေသလက္ခဏာများကို အခွင့်ကောင်းယူရန် လိုအပ်သော ရွေ့လျားမှုထိန်းချုပ်မှုစနစ်များသည် ဤကုန်ကျစရိတ်မြင့်မားသော မော်တာများသည် ၎င်းတို့၏အလေးချိန်ကို ရွှေကဲ့သို့တန်ဖိုးရှိကြောင်း သက်သေပြရမည်ဖြစ်သည်။
closed-loop control ပါရှိသော Stepper မော်တာများ
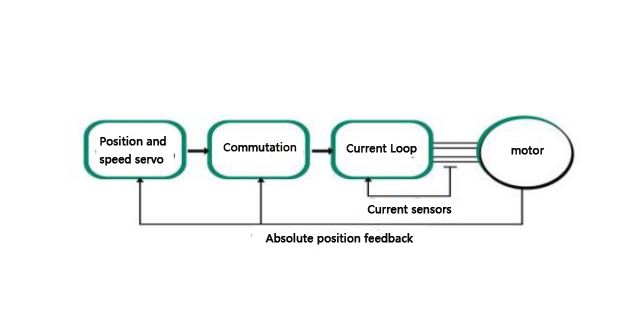
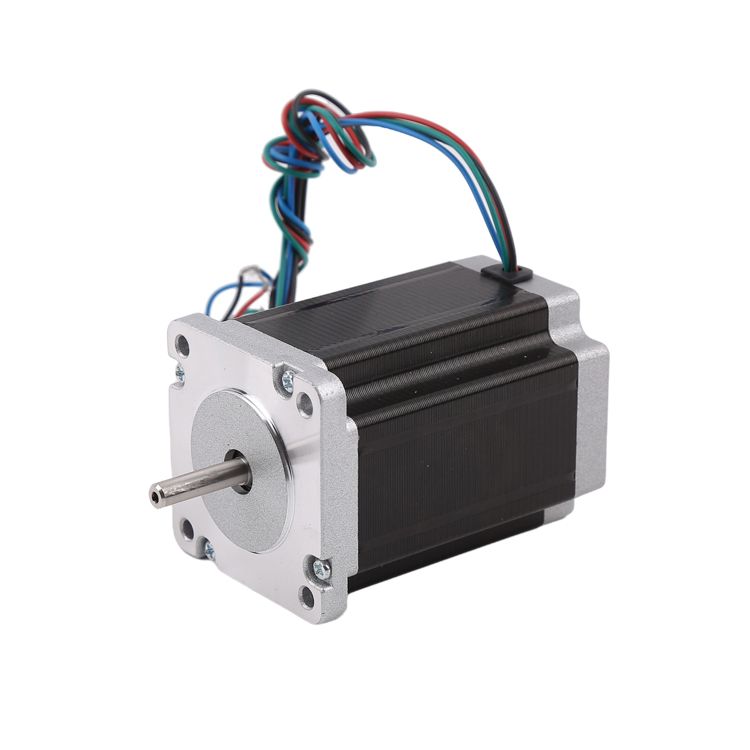
ပေါင်းစပ်အီလက်ထရွန်းနစ်ထိန်းချုပ်မှုပါရှိသော stepper မော်တာသည် two-phase brushless DC မော်တာနှင့် ညီမျှပြီး position loop control၊ speed loop control၊ DQ control နှင့် အခြား algorithms များကို လုပ်ဆောင်နိုင်သည်။ closed-loop commutation အတွက် single-turn absolute encoder ကို အသုံးပြုထားသောကြောင့် မည်သည့်အမြန်နှုန်းတွင်မဆို အကောင်းဆုံး torque ကို သေချာစေသည်။
စွမ်းအင်သုံးစွဲမှုနည်းပါးပြီး အေးမြမှုကို ထိန်းသိမ်းပေးခြင်း
VIC stepper မော်တာများသည် စွမ်းအင်ချွေတာမှု အလွန်မြင့်မားပါသည်။ အပြည့်အဝလျှပ်စီးကြောင်းဖြင့် အမြဲတမ်းလည်ပတ်ပြီး အပူနှင့်ဆူညံသံပြဿနာများကို ဖြစ်စေသော open-loop stepper မော်တာများနှင့်မတူဘဲ၊ လျှပ်စီးကြောင်းသည် ရွေ့လျားမှု၏ တကယ့်အခြေအနေများပေါ် မူတည်၍ ပြောင်းလဲသည်၊ ဥပမာအားဖြင့် အရှိန်မြှင့်ခြင်းနှင့် နှေးကွေးခြင်းတွင်ဖြစ်သည်။ servo များနှင့်ဆင်တူသည်မှာ၊ ဤ stepper မော်တာများမှ မည်သည့်အချိန်တွင်မဆို သုံးစွဲသော လျှပ်စီးကြောင်းသည် လိုအပ်သော တကယ့် torque နှင့် အချိုးကျသည်။ မော်တာနှင့် ပေါင်းစပ်ထားသော အီလက်ထရွန်းနစ်ထိန်းချုပ်မှုဘုတ်သည် အေးအောင်လည်ပတ်သောကြောင့် VIC stepper မော်တာများသည် servo မော်တာများနှင့် နှိုင်းယှဉ်နိုင်သော ပိုမိုမြင့်မားသော peak torque များကို ရရှိနိုင်သည်။
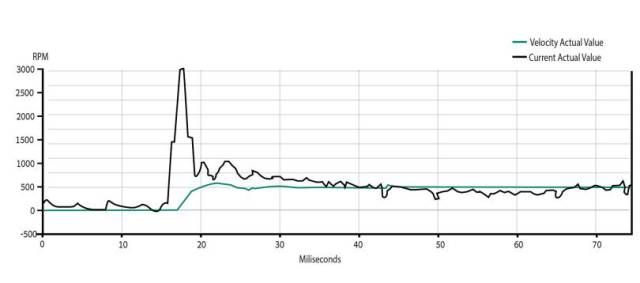
မြန်နှုန်းမြင့်များတွင်ပင် VIC stepper မော်တာများသည် လျှပ်စီးကြောင်း နည်းပါးစွာ လိုအပ်သည်
closed-loop နည်းပညာတိုးတက်မှုများကြောင့် stepper motor များသည် ယခင်က servo motor များနှင့်သာ သီးသန့်သက်ဆိုင်သည့် မြင့်မားသောစွမ်းဆောင်ရည်၊ မြန်နှုန်းမြင့် application များကို ထိုးဖောက်ဝင်ရောက်နိုင်သည်။
closed-loop နည်းပညာပါရှိသော Stepper မော်တာများ
closed-loop servo နည်းပညာရဲ့ အားသာချက်တွေကို stepper motor တွေမှာ အသုံးချနိုင်ရင်ကော။
stepper motor တွေရဲ့ ကုန်ကျစရိတ် အားသာချက်တွေကို သဘောပေါက်နေချိန်မှာပဲ servo motor တွေနဲ့ ယှဉ်နိုင်တဲ့ စွမ်းဆောင်ရည်ကို ရရှိနိုင်ပါ့မလား။
closed-loop control နည်းပညာကို ပေါင်းစပ်ခြင်းဖြင့် stepper motor သည် servo နှင့် stepper motor နှစ်မျိုးလုံး၏ အားသာချက်များကို ဈေးနှုန်းသက်သာစွာဖြင့် ရရှိနိုင်သော ပြည့်စုံသော ထုတ်ကုန်တစ်ခု ဖြစ်လာမည်ဖြစ်သည်။ closed-loop stepper motor များသည် စွမ်းဆောင်ရည်နှင့် စွမ်းအင်ထိရောက်မှုတွင် သိသာထင်ရှားသော တိုးတက်မှုများကို ပေးစွမ်းသောကြောင့်၊ ၎င်းတို့သည် ပိုမိုစျေးကြီးသော servo motor များကို မြင့်မားသော စံနှုန်းအသုံးချမှုများတွင် အစားထိုးနိုင်သည်။
အောက်ပါတို့သည် closed-loop နည်းပညာပါရှိသော stepper မော်တာများ၏ စွမ်းဆောင်ရည်နှင့် အားသာချက်များနှင့် အားနည်းချက်များကို ရှင်းပြရန်အတွက် embedded closed-loop control ပါရှိသော VIC integrated stepper motor ၏ ဥပမာတစ်ခုဖြစ်သည်။
တိကျစွာ ကိုက်ညီသော စွမ်းဆောင်ရည် လိုအပ်ချက်များ
နှောင့်ယှက်မှုများကို ကျော်လွှားရန်နှင့် ပျောက်ဆုံးသွားသော အဆင့်များကို ရှောင်ရှားရန် လုံလောက်သော torque ကို သေချာစေရန်အတွက်၊ open-loop stepper မော်တာများသည် အပလီကေးရှင်းမှ လိုအပ်သော တန်ဖိုးထက် အနည်းဆုံး torque ၄၀% ပိုများကြောင်း သေချာစေရန် လိုအပ်ပါသည်။ ယနေ့ closed-loop stepper မော်တာများတွင် ဤပြဿနာမရှိပါ။ ဤ stepper မော်တာများသည် overload ကြောင့် ရပ်တန့်သွားသောအခါ၊ torque မဆုံးရှုံးဘဲ ဝန်ကို ဆက်လက်ထိန်းထားမည်ဖြစ်သည်။ overload အခြေအနေကို ဖယ်ရှားပြီးနောက် ၎င်းတို့သည် ဆက်လက်လည်ပတ်နေမည်ဖြစ်သည်။ အမြင့်ဆုံး torque ကို မည်သည့်အမြန်နှုန်းတွင်မဆို အာမခံနိုင်ပြီး position sensor သည် step ဆုံးရှုံးမှုမရှိကြောင်း သေချာစေသည်။ ထို့ကြောင့် closed-loop stepper မော်တာများကို နောက်ထပ် ၄၀% margin မလိုအပ်ဘဲ သက်ဆိုင်ရာအပလီကေးရှင်း၏ torque လိုအပ်ချက်များနှင့် အတိအကျကိုက်ညီစေရန် သတ်မှတ်နိုင်သည်။
open-loop stepper မော်တာများဖြင့် ခြေလှမ်းများ ပျောက်ဆုံးသွားနိုင်ခြေကြောင့် မြင့်မားသော လက်ငင်း torque လိုအပ်ချက်များကို ဖြည့်ဆည်းရန် ခက်ခဲပါသည်။ ရိုးရာ stepper မော်တာများနှင့် နှိုင်းယှဉ်ပါက VIC closed-loop stepper မော်တာများသည် အလွန်မြန်ဆန်သော အရှိန်မြှင့်တင်မှု၊ လည်ပတ်မှုဆူညံသံနည်းပါးမှုနှင့် ပဲ့တင်သံနည်းပါးမှုကို ရရှိနိုင်ပါသည်။ ၎င်းတို့သည် bandwidth မြင့်မားစွာ လည်ပတ်နိုင်ပြီး ကောင်းမွန်သော စွမ်းဆောင်ရည်ကို ရရှိစေပါသည်။
ဗီရို မရှိပါ
Toda သည် drive control board ကို မော်တာနှင့် ပေါင်းစပ်ထားသောကြောင့် ဝါယာကြိုးများ အသုံးပြုမှု လျော့နည်းစေပြီး အကောင်အထည်ဖော်မှု ဖြေရှင်းချက်ကို ရိုးရှင်းစေသည်။ toda ဖြင့် သင်သည် ဗီဒိုများမပါဘဲ စက်များကို တည်ဆောက်နိုင်သည်။
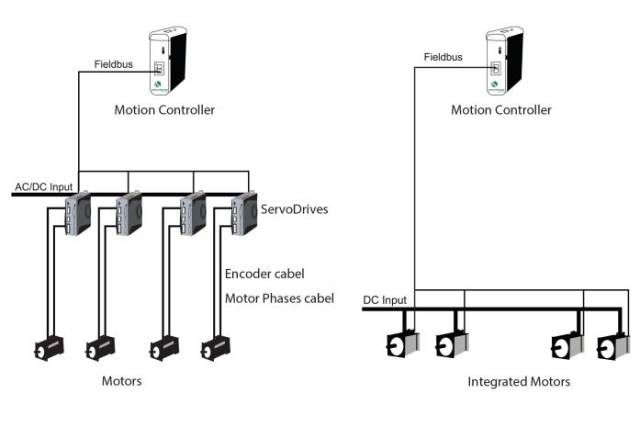
အီလက်ထရွန်းနစ်ပစ္စည်းများကို stepper motor များနှင့် ပေါင်းစပ်ခြင်းသည် ရှုပ်ထွေးမှုကို လျှော့ချပေးသည်
closed-loop နည်းပညာဖြင့် closed-loop stepper မော်တာများသည် servo မော်တာ၏ စွမ်းဆောင်ရည်နှင့် stepper မော်တာ၏ ကုန်ကျစရိတ်နည်းပါးမှုတို့ဖြင့် အသုံးပြုသူများအား အလွန်ကောင်းမွန်သော တိကျမှုနှင့် ထိရောက်မှုကို ပေးစွမ်းသည်။ ကုန်ကျစရိတ်နည်းသော stepper မော်တာများသည် ကုန်ကျစရိတ်မြင့်မားသော servo မော်တာများက လွှမ်းမိုးထားမည့် အသုံးချမှုများကို တဖြည်းဖြည်းချင်း ထိုးဖောက်ဝင်ရောက်လျက်ရှိသည်။
ပို့စ်တင်ချိန်: ၂၀၂၃ ခုနှစ်၊ ဧပြီလ ၁၀ ရက်