အရည်တစ်ခုခုကို တိုင်းတာခြင်းနှင့် ထုတ်လွှတ်ခြင်းနှင့်ပတ်သက်လာလျှင် ယနေ့ခေတ်ဓာတ်ခွဲခန်းပတ်ဝန်းကျင်တွင် ပိုက်ပက်များသည် မရှိမဖြစ်လိုအပ်ပါသည်။ ဓာတ်ခွဲခန်း၏ အရွယ်အစားနှင့် ထုတ်လွှတ်ရန်လိုအပ်သော ပမာဏပေါ် မူတည်၍ ပိုက်ပက်အမျိုးအစား အမျိုးမျိုးကို အသုံးများပါသည်-
- လေရွှေ့ပြောင်းပိုက်ပက်များ
- အပြုသဘောဆောင်သော ရွှေ့ပြောင်းမှု ပိုက်ပက်များ
- တိုင်းတာသည့်ပိုက်ပက်များ
- ချိန်ညှိနိုင်သော အကွာအဝေးရှိသော ပိုက်ပက်များ
၂၀၂၀ ခုနှစ်တွင် COVID-19 ကို တိုက်ဖျက်ရာတွင် လေရွှေ့ပြောင်းမှု မိုက်ခရိုပိုက်ပက်များသည် အရေးပါသော အခန်းကဏ္ဍမှ ပါဝင်နေသည်ကို ကျွန်ုပ်တို့ စတင်တွေ့မြင်နေရပြီး ၎င်းတို့ကို ရောဂါပိုးများ ထောက်လှမ်းရန်အတွက် နမူနာပြင်ဆင်မှု (ဥပမာ- အချိန်နှင့်တပြေးညီ RT-PCR) အတွက် အသုံးပြုပါသည်။ ပုံမှန်အားဖြင့် လက်ဖြင့် သို့မဟုတ် မော်တာဖြင့် လေရွှေ့ပြောင်းမှု ပိုက်ပက်များကို ဒီဇိုင်းနှစ်မျိုးဖြင့် အသုံးပြုနိုင်ပါသည်။
လက်စွဲလေရွှေ့ပြောင်းပိုက်ပက်များနှင့် မော်တာသုံးလေရွှေ့ပြောင်းပိုက်ပက်များ
လေရွှေ့ပြောင်းပိုက်၏ ဥပမာတွင်၊ ပစ္စတင်ကို ပိုက်အတွင်း၌ အပေါ် သို့မဟုတ် အောက်သို့ ရွှေ့ပြီး လေကော်လံပေါ်တွင် အနုတ် သို့မဟုတ် အပေါင်းဖိအားကို ဖန်တီးပေးသည်။ ၎င်းသည် အသုံးပြုသူအား တစ်ခါသုံးပိုက်ထိပ်ကို အသုံးပြု၍ အရည်နမူနာကို ရှူသွင်း သို့မဟုတ် ထုတ်လွှတ်နိုင်စေပြီး၊ အဖျားရှိ လေကော်လံသည် ပိုက်၏ တစ်ခါသုံးမဟုတ်သော အစိတ်အပိုင်းများနှင့် အရည်ကို ခွဲထုတ်သည်။
ပစ္စတင်၏ ရွေ့လျားမှုကို အော်ပရေတာမှ ကိုယ်တိုင် သို့မဟုတ် အီလက်ထရွန်းနစ်နည်းဖြင့် လုပ်ဆောင်ရန် ဒီဇိုင်းထုတ်နိုင်သည်၊ ဆိုလိုသည်မှာ အော်ပရေတာသည် ခလုတ်နှိပ်ထိန်းချုပ်ထားသော မော်တာကို အသုံးပြု၍ ပစ္စတင်ကို ရွှေ့သည်။

လက်ကိုင်ပိုက်ပက်များ၏ ကန့်သတ်ချက်များ
လက်ဖြင့်ပိုက်ပက်များကို ကြာရှည်စွာအသုံးပြုခြင်းသည် လည်ပတ်သူအား မသက်မသာဖြစ်စေခြင်းနှင့် ဒဏ်ရာပင်ဖြစ်စေနိုင်သည်။ အရည်များထုတ်ပေးရန်နှင့် ပိုက်ပက်အဖျားကို ထုတ်ရန် လိုအပ်သောအားနှင့် နာရီပေါင်းများစွာ မကြာခဏ ထပ်ခါတလဲလဲလှုပ်ရှားမှုများ ပေါင်းစပ်လိုက်သောအခါ အဆစ်များ၊ အထူးသဖြင့် လက်မ၊ တံတောင်ဆစ်၊ လက်ကောက်ဝတ်နှင့် ပခုံးတို့တွင် RS (I ထပ်ခါတလဲလဲကြွက်သားတင်းမာမှု) အန္တရာယ်ရှိနိုင်သည်။
လက်ကိုင်ပိုက်ပက်များသည် အရည်ထုတ်လွှတ်ရန်အတွက် လက်မခလုတ်ကို နှိပ်ရန် လိုအပ်ပြီး အီလက်ထရွန်းနစ်ပိုက်ပက်များသည် ဤဥပမာတွင် အီလက်ထရွန်းနစ်နည်းဖြင့် လှုံ့ဆော်ပေးသော ခလုတ်ဖြင့် ပိုမိုကောင်းမွန်သော ergonomics ကို ပေးစွမ်းသည်။
အီလက်ထရွန်းနစ် အစားထိုးပစ္စည်းများ
အီလက်ထရွန်းနစ် သို့မဟုတ် မော်တာသုံး ပိုက်ပက်များသည် နမူနာအထွက်ကို ထိရောက်စွာ တိုးတက်စေပြီး တိကျမှုကို သေချာစေသည့် လက်စွဲပိုက်ပက်များအတွက် ergonomic အစားထိုးပစ္စည်းများဖြစ်သည်။ ရိုးရာ လက်မဖြင့် ထိန်းချုပ်သော ခလုတ်များနှင့် လက်စွဲ volume ချိန်ညှိမှုများနှင့် မတူဘဲ၊ လျှပ်စစ်ပိုက်ပက်များတွင် volume ချိန်ညှိရန်နှင့် လျှပ်စစ်စွမ်းအင်သုံး ပစ္စတင်မှတစ်ဆင့် စုပ်ယူပြီး ထုတ်လွှတ်ရန်အတွက် ဒစ်ဂျစ်တယ် interface ပါရှိသည်။

အီလက်ထရွန်းနစ် ပိုက်ပက်များအတွက် မော်တာရွေးချယ်မှု
ပိုက်ပက်ခြင်းသည် အဆင့်များစွာပါဝင်သော လုပ်ငန်းစဉ်တွင် ပထမခြေလှမ်းဖြစ်လေ့ရှိသောကြောင့်၊ အရည်၏ ဤအပိုင်းငယ်ကို တိုင်းတာသည့်အခါ ဖြစ်ပေါ်လာသော မတိကျမှုများ သို့မဟုတ် အပြစ်အနာအဆာများကို လုပ်ငန်းစဉ်တစ်လျှောက်လုံးတွင် ခံစားရနိုင်ပြီး၊ နောက်ဆုံးတွင် အလုံးစုံတိကျမှုနှင့် တိကျမှုကို ထိခိုက်စေပါသည်။
တိကျမှုနှင့် တိကျမှုဆိုတာ ဘာလဲ။
ပိုက်ပက်တစ်ခုသည် တူညီသောပမာဏကို အကြိမ်ပေါင်းများစွာ ထုတ်လွှတ်သည့်အခါ တိကျမှုကို ရရှိသည်။ ပိုက်ပက်သည် ပစ်မှတ်ပမာဏကို အမှားအယွင်းမရှိဘဲ တိကျစွာ ထုတ်လွှတ်သည့်အခါ တိကျမှုကို ရရှိသည်။ တိကျမှုနှင့် တိကျမှုကို တစ်ပြိုင်နက်တည်းရရှိရန် ခက်ခဲသော်လည်း ပိုက်ပက်များကို အသုံးပြုသော စက်မှုလုပ်ငန်းများသည် တိကျမှုနှင့် တိကျမှု နှစ်မျိုးလုံး လိုအပ်ပါသည်။ အမှန်စင်စစ်၊ ဤအလွန်မြင့်မားသော စံနှုန်းသည် စမ်းသပ်ရလဒ်များကို ပြန်လည်ထုတ်လုပ်နိုင်စေပါသည်။
အီလက်ထရွန်းနစ်ပိုက်ပက်တိုင်း၏ အဓိကအချက်မှာ ၎င်း၏မော်တာဖြစ်ပြီး ပိုက်ပက်၏ တိကျမှုနှင့် တိကျမှုကို သိသိသာသာ သက်ရောက်မှုရှိသည့်အပြင် အထုပ်အရွယ်အစား၊ ပါဝါနှင့် အလေးချိန်ကဲ့သို့သော အခြားအရေးကြီးသောအချက်များစွာလည်း ပါဝင်သည်။ ပိုက်ပက်ဒီဇိုင်းအင်ဂျင်နီယာများသည် အဓိကအားဖြင့် stepper linear actuators သို့မဟုတ် DC မော်တာများကို ရွေးချယ်ကြသည်။ သို့သော် stepper မော်တာများနှင့် DC မော်တာများ နှစ်မျိုးလုံးတွင် ၎င်းတို့၏ကိုယ်ပိုင် အားသာချက်များနှင့် အားနည်းချက်များရှိသည်။
DC မော်တာများ
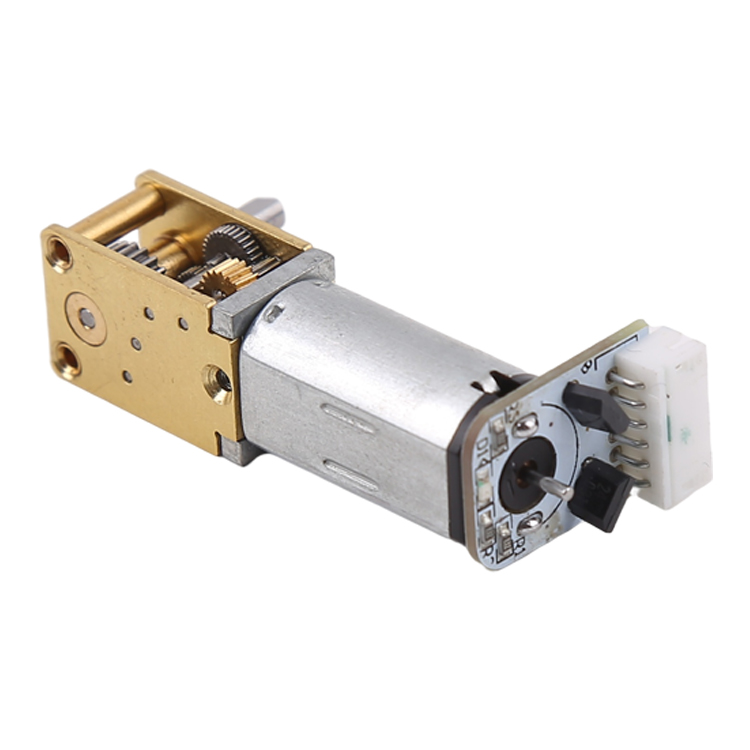
DC မော်တာများသည် DC ပါဝါအသုံးပြုသည့်အခါ လည်ပတ်သည့် ရိုးရှင်းသော မော်တာများဖြစ်သည်။ ၎င်းတို့သည် မော်တာလည်ပတ်စေရန် ရှုပ်ထွေးသော ချိတ်ဆက်မှုများ မလိုအပ်ပါ။ သို့သော်၊ အီလက်ထရွန်းနစ် ပိုက်ပက်များ၏ မျဉ်းဖြောင့်ရွေ့လျားမှု လိုအပ်ချက်များကြောင့်၊ DC မော်တာဖြေရှင်းချက်များတွင် လည်ပတ်ရွေ့လျားမှုကို မျဉ်းဖြောင့်ရွေ့လျားမှုအဖြစ်သို့ ပြောင်းလဲရန်နှင့် လိုအပ်သောအားကို ပေးစွမ်းရန်အတွက် အပိုဆောင်း ခဲဝက်အူနှင့် ဂီယာတစ်ခု လိုအပ်သည်။ DC ဖြေရှင်းချက်များတွင် မျဉ်းဖြောင့်ပစ္စတင်၏ အနေအထားကို တိကျစွာထိန်းချုပ်ရန်အတွက် optical sensor သို့မဟုတ် encoder ပုံစံဖြင့် feedback ယန္တရားတစ်ခုလည်း လိုအပ်သည်။ ၎င်း၏ rotor ၏ မြင့်မားသော inertia ကြောင့်၊ ဒီဇိုင်နာအချို့သည် အနေအထားတိကျမှုကို မြှင့်တင်ရန် ဘရိတ်စနစ်ကိုလည်း ထည့်သွင်းနိုင်သည်။
စတက်ပါ မော်တာများ
အခြားတစ်ဖက်တွင်မူ၊ အင်ဂျင်နီယာများစွာသည် ၎င်းတို့၏ ပေါင်းစပ်ရလွယ်ကူမှု၊ ကောင်းမွန်သောစွမ်းဆောင်ရည်နှင့် ကုန်ကျစရိတ်နည်းပါးမှုကြောင့် stepper linear actuator ဖြေရှင်းချက်များကို ပိုမိုနှစ်သက်ကြသည်။ Stepper linear actuators များတွင် threaded rotor နှင့် integrated filament bar ပါရှိသော permanent magnet stepper motors များပါဝင်ပြီး သေးငယ်သော package များတွင် တိုက်ရိုက် linear motion ကို ထုတ်လုပ်ပေးသည်။

ပို့စ်တင်ချိန်: ၂၀၂၄ ခုနှစ်၊ ဇွန်လ ၁၉ ရက်