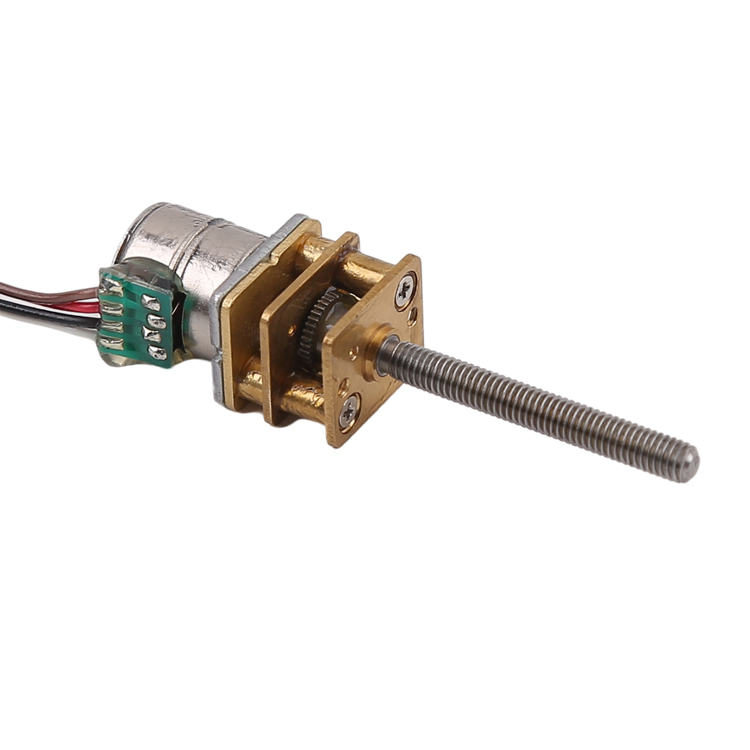
မိုက်ခရိုဂီယာမော်တာမော်တာနှင့် ဂီယာဘောက်စ်ပါ၀င်သည်၊ မော်တာသည် ပါဝါရင်းမြစ်ဖြစ်သည်၊ မော်တာမြန်နှုန်းသည် အလွန်မြင့်မားသည်၊ torque သည် အလွန်သေးငယ်သည်၊ မော်တာလည်ပတ်ရွေ့လျားမှုကို မော်တာရိုးတံပေါ်တွင်တပ်ဆင်ထားသော (သန်ကောင်အပါအဝင်) မှတဆင့် ဂီယာဘောက်စ်သို့ ပေးပို့သည်၊ ထို့ကြောင့် မော်တာရိုးတံသည် မိုက်ခရိုဂီယာမော်တာတွင် အလွန်အရေးကြီးသောအစိတ်အပိုင်းများထဲမှတစ်ခုဖြစ်သည်။
I. မော်တာရိုးတံ၏ပစ္စည်း
Shaft ပစ္စည်းရွေးချယ်ရာတွင် torque အရွယ်အစား၊ ပြုပြင်နိုင်မှု၊ ချေးခံနိုင်ရည်နှင့် မော်တာလိုအပ်ချက်အရ သံလိုက်လျှပ်ကူးမှုရှိမရှိ၊ ပစ္စည်းအား အရည်အသွေးမြင့် ကာဗွန်သံမဏိ၊ သံမဏိ၊ အလွိုင်းစတီး၊ carburized သံမဏိစသည်တို့မှ ရွေးချယ်နိုင်ပါသည်။ အသုံးများသော မော်တာရိုးတံပစ္စည်းများမှာ အောက်ပါအမျိုးအစားများဖြစ်သည်။
1. American Standard 1141 & 1144 သံမဏိ၊ အနီးစပ်ဆုံး ပြည်တွင်းပစ္စည်းမှာ အမှတ် ၄၅ သံမဏိဖြစ်ပြီး၊ လက်ရှိ စက်မှုလုပ်ငန်းတွင် အသုံးအများဆုံး ပစ္စည်းဖြစ်သည်။ အဓိက အားနည်းချက်မှာ သံချေးတက်ရန် လွယ်ကူသောကြောင့် အသုံးပြုသည့်အခါတွင် သံချေးတက်သည့် ပြဿနာကို သက်သာစေရန် နောက်ထပ် သံချေးတက်သည့်ဆီ ထပ်လောင်းရန် လိုအပ်ပါသည်။
2.American Standard 416 stainless steel၊ အနီးစပ်ဆုံး ပြည်တွင်းပစ္စည်းမှာ Y1Cr13 ဖြစ်သည်။ လုပ်ဆောင်ရန်မလွယ်ကူပါ၊ ရှုပ်ထွေးသောအင်္ဂါရပ်များဖြစ်သည့် ရှပ်ခေါင်းကြိုးများကဲ့သို့သော ရှုပ်ထွေးသောအင်္ဂါရပ်များဖြင့် လုပ်ဆောင်ရန်မသင့်တော်ပါ၊ စျေးနှုန်းသည် 45 သံမဏိထက်ပိုမိုစျေးကြီးသည်၊ 303 ထက်ပိုမိုစျေးပေါသည်၊ ပိုမိုတွင်ကျယ်စွာအသုံးပြုသည်။
3.American Standard 420 stainless steel၊ အနီးစပ်ဆုံး ပြည်တွင်းပစ္စည်းမှာ 2Cr13 ဖြစ်သည်။ လုပ်ဆောင်ရန်မလွယ်ကူပါ၊ ရှုပ်ထွေးသောအင်္ဂါရပ်များဖြစ်သည့် ရှပ်ခေါင်း၊ ချည်ခေါင်း၊ 45 သံမဏိထက် ပိုစျေးကြီးသော၊ 416/303 ထက် စျေးသက်သာသော၊ ပိုမိုတွင်ကျယ်စွာ အသုံးပြုသည်။
4. American Standard 431 stainless steel၊ ဤပစ္စည်းကို အစားအစာနှင့် ထိတွေ့ရာတွင် အဓိကအားဖြင့် အသုံးများသည်။ အစားအစာနှင့် ထိတွေ့နိုင်သည်။
5. American Standard 303 stainless steel၊ ပိုစျေးကြီးပြီး ပျော့ပျောင်းသောပစ္စည်းဖြင့် သွင်ပြင်လက္ခဏာဖြစ်ပြီး ရှုပ်ထွေးသောပုံစံများအဖြစ် လုပ်ဆောင်ရန် လွယ်ကူသည်။
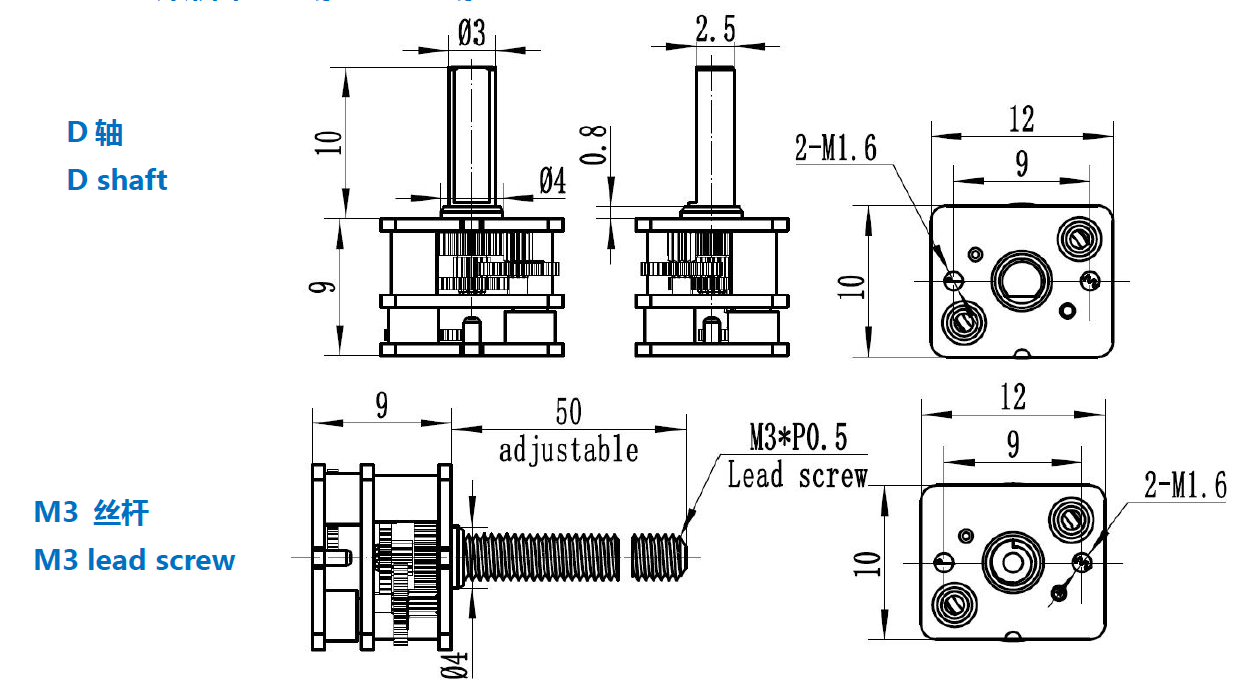
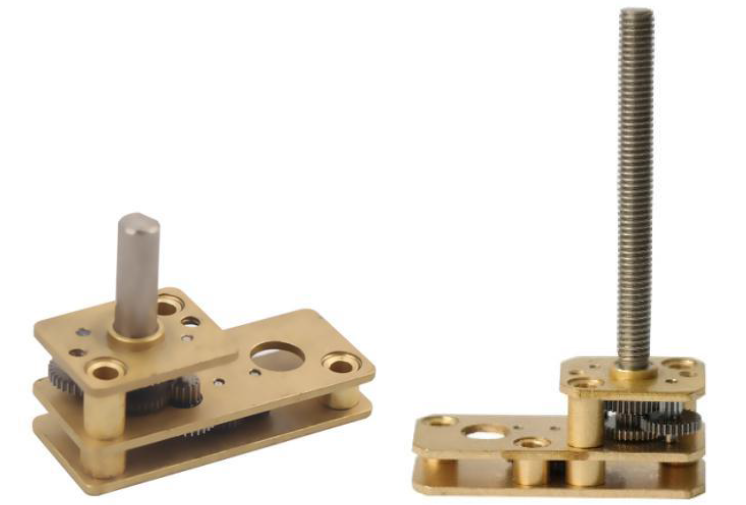
II မော်တာရိုးတံပုံသဏ္ဍာန်
Micro geared motor အတွင်းရှိ မော်တာသွားများနှင့် rotary motion ကို မလွှဲမရှောင်သာ ထုတ်ပေးမည့် rotary motion ကို ထုတ်ပေးရန်အတွက် ဂီယာဘောက်စ်ရှိ ပထမအဆင့်သွားများသည် torque ဖြစ်သောကြောင့် မော်တာသွားများနှင့် မော်တာရိုးတံများ၏ အံဝင်ခွင်ကျ တင်းကျပ်မှုသည် အလွန်အရေးကြီးပါသည်။ မော်တာသွားများနှင့် မော်တာရိုးတံများ အံဝင်ခွင်ကျဖြစ်မှုကို သုံးသပ်ကြည့်ပါ၊ ကျွန်ုပ်တို့သည် မော်တာရိုးတံ၏ ပုံသဏ္ဍာန်ကို မရရှိနိုင်ပါ။
မော်တာ ရှပ်ပုံသဏ္ဍာန်များ ဖြစ်ကြပါသည်။
A. သေးငယ်သောဝန်နှင့်သေးငယ်သော torque အတွက်သင့်လျော်သောအလင်းရိုးတံ။
B. Flat shaft သို့မဟုတ် D-shape shaft, medium load အတွက် သင့်လျော်သည်။
C. Knurled shaft, medium load အတွက် သင့်လျော်သည်။
D. လေးလံသောဝန်နှင့် မြင့်မားသော torque အတွက်သင့်လျော်သောသော့လမ်းကြောင်းဖြင့်လှည့်သောရိုးတံ။
E. Motor shaft ၏ output end သည် worm ဖြစ်ပြီး၊ ဤ motor shaft အမျိုးအစားသည် အထူးဖြစ်သည်၊ အများအားဖြင့် turbo worm drive အတွက် သုံးသည်။
III မော်တာရိုးတံ၏ လုပ်ငန်းစဉ်လိုအပ်ချက်များ
မိုက်ခရိုဂီယာမော်တာများဘဝလိုအပ်ချက်များရှိပြီး မော်တာရိုးတံ၏ လုပ်ငန်းစဉ်လိုအပ်ချက်များသည် မိုက်ခရိုဂီယာမော်တာ၏ သက်တမ်းကိုလည်း ထိခိုက်စေပါသည်။
motor shaft ၏ processing technology ပါရှိပါသည်။
A.Motor shaft အချင်းအရွယ်အစားတိကျမှုသည်အတော်လေးမြင့်မားသည်၊ 0.002mm အတွင်းအောင်မြင်နိုင်သည်။
B. သံချေးမတက်အောင် ကာကွယ်ရန်နှင့် ချေးခံနိုင်ရည်ကို တိုးတက်စေရန်အတွက်၊ မော်တာရိုးတံ၏မျက်နှာပြင်ကို နီကယ်ဖြင့် မကြာခဏ လျှပ်ကူးပေးပါသည်။
ဂ။ မော်တာရိုးတံ၏ မျက်နှာပြင်ကြမ်းတမ်းမှုသည် အလွန်အရေးကြီးသည်၊ ၎င်းသည် မော်တာသွားများနှင့်အံဝင်ခွင်ကျမှု၏တိကျမှုကို တိုက်ရိုက်အကျိုးသက်ရောက်စေသည်။
IV Speed reducer drive shaft အမျိုးအစားခွဲခြားခြင်း။
လျှော့ချကိရိယာကို ပါဝါအလိုက် ပါဝါမြင့်သည့်အလျှော့ပေးသူနှင့် ပါဝါနိမ့်သည့်အလျှော့ပေးသူဟူ၍ ခွဲခြားထားသည်။ အမျိုးမျိုးသော ပါဝါ၊ မော်ဒယ်နှင့် သတ်မှတ်ချက် လျော့ပါးသည့် အထွက်ဝင်ရိုးမှာလည်း ကွဲပြားပြီး ဂီယာဖြတ်တံကို အထွက်ဝင်ရိုးနှင့် အဝင်ရိုးရိုးဟူ၍ ခွဲခြားထားပြီး ရှပ်အမျိုးအစား နှစ်မျိုး၏ နိယာမကို အောက်တွင် အသေးစိတ် မိတ်ဆက်ပေးထားသည်။
1. Output shaft
Output shaft သည် reducer နှင့် transmission mechanism နှင့် ချိတ်ဆက်ထားသော shaft ဖြစ်ပြီး၊ output shaft ၏ output speed သည် အလွန်နှေးကွေးသည်၊ material output shaft သည် metal output shaft, plastic output shaft ဟူ၍ခွဲခြားထားသည်။ ပုံသဏ္ဍာန်အရ စိတ်ကြိုက်ပြုပြင်နိုင်သော D-shaped shaft၊ round shaft, double flat shaft, hexagonal shaft, pentagonal shaft, square shaft, etc.
2. Input shaft
Input shaft သည် transmission motor နှင့် reducer ၏ ချိတ်ဆက်ထားသော transmission shaft ဖြစ်ပြီး၊ input speed နှင့် torque of input shaft သည် သေးငယ်သည်၊ shaft diameter; input shaft ၏အဆုံးတစ်ဖက်သည် mounting hole မှတဆင့် mounting cavity သို့ မြှုပ်နှံနိုင်ပြီး၊ input shaft သည် mounting shell ရှိ gear နှင့် mesh လုပ်နိုင်သည်၊ mounting slot ကို input shaft ၏အခြားအဆုံးတွင်ဖွင့်ထားပြီး၊ ထို့နောက် mounting slot တွင် motor shaft ၏ motor shaft ကို mounting slot တွင် မြှုပ်ထားပြီး၊ flat key သည် fast shaft နှင့် တည်ငြိမ်သောမော်တာကြားရှိ အထိုင်နှင့် မော်တာကြားရှိ ခလုတ်ကြားတွင် ထည့်သွင်းထားသည် input shaft ကိုအောင်မြင်သည်။ အဝင်ဝင်ရိုး၊ တပ်ဆင်အခြေစိုက်စခန်း၊ တပ်ဆင်ခြင်းအထိုင်နှင့် အပြားသော့အပေါက်ကြားတွင် အထက်ဖော်ပြပါ ပူးပေါင်းဆောင်ရွက်မှုမှတစ်ဆင့် ဂီယာမော်တာအား တပ်ဆင်ခြင်းအိမ်ရာနှင့် တပ်ဆင်ထားသော မော်တာအား အမြန်တပ်ဆင်စေပြီး ဝန်ထမ်းများကို တင်ဆောင်ခြင်းနှင့် သယ်ယူခြင်းတို့ကို ပိုမိုအဆင်ပြေစေပါသည်။
3. reducer ၏ transmission shaft ၏ အခန်းကဏ္ဍနှင့် ကွာခြားချက်။
A. အချို့သော အာဏာပမာဏကို လွှဲပြောင်းပါ။
B. အရှိန်လျော့ခြင်း၏ ရည်ရွယ်ချက်ကို အောင်မြင်ရန် အဝင်အမြန်နှုန်း လည်ပတ်မှု၊ အထွက်နှုန်း နည်းသော လည်ပတ်မှု။ ပွတ်တိုက်မှုအား လျစ်လျူရှုခြင်း၏ ပရဝဏ်တွင်၊ input shaft နှင့် output shaft သည် တူညီသောပါဝါကို လွှဲပြောင်းပေးပြီး power = torque * speed ၊ ဆိုလိုသည်မှာ ပါဝါညီမျှသောအခါ torque နှင့် speed input shaft speed သည် torque သေးငယ်သည်၊ သေးငယ်သော shaft diameter သာဖြစ်သည်။ အပြန်အလှန်အားဖြင့်၊ output shaft speed နိမ့်သောကြောင့် torque ကြီးမားသည်၊ ပိုကြီးသော shaft diameter ကိုသုံးရပါမည်။
V. သေးငယ်သောဂီယာတပ်ထားသော မော်တာ၏ ဝက်ဝံများကို အပူပေးရသည့် အကြောင်းရင်းများကား အဘယ်နည်း။
မိုက်ခရိုဂီယာမော်တာပုံမှန်လည်ပတ်မှုတွင်, bearing သည်ပုံမှန်မဟုတ်သောအပူပေါ်လာမည်မဟုတ်ပါ၊ micro geared motor bearing heating ပြင်းထန်သောအားဖြင့်အောက်ပါအကြောင်းပြချက်များရှိသည်။
1. miniature reducer motor bearing ပျက်စီးပြီး motor bearing ကို အပူလွန်ကဲစေပါလိမ့်မယ်။
2. ချောဆီဆီသည် ဝက်ဝံပေါ်ရှိ ပုံမှန်မဟုတ်သော အမှုန်အမွှားများ သို့မဟုတ် ပြင်ပအရာများနှင့် ရောနှောကာ ဝက်ဝံကို အပူလွန်ကဲစေပါသည်။
3. သေးငယ်သောအလျှော့ပေးသည့်မော်တာသည် ဝက်ဝံဆီပြတ်တောက်မှုဖြစ်ပြီး ဤအခြေအနေတွင် အချိန်ကြာကြာရှိနေပါက မော်တာသည် ပွတ်တိုက်မှုကို တိုးမြင့်စေပြီး ဝက်ဝံအပူလွန်ကဲစေမည်ဖြစ်သည်။
4. ချောဆီ၏အရည်အသွေးသည် ညံ့ဖျင်းလွန်းသည်၊ မလုံလောက်သော viscosity သို့မဟုတ် viscosity မြင့်မားလွန်းသည်၊ ချောဆီ၏စွမ်းဆောင်ရည်သည်လည်း bearing ၏ပုံမှန်မဟုတ်သောအပူကိုဖြစ်ပေါ်စေပါသည်။
5. miniature reducer bearing and output shaft, end cover is too loose or too tight, too tight သည် bearing deformation ကို ဖြစ်ပေါ်စေပြီး၊ အလွန်လျော့ရဲခြင်း သည် offset ကို ဖြစ်ပေါ်စေပြီး bearing heating ကို ပြင်းထန်စေသည်။
6. ရိုးတံနှစ်ခုသည် မျဉ်းဖြောင့်တွင်မရှိစေရန် သို့မဟုတ် ဝက်ဝံအပြင်ဘက်လက်စွပ်မညီမျှစေရန်အတွက် ဝက်ဝံများကို မလျော်ကန်စွာတပ်ဆင်ခြင်းသည် ဝန်အားပိုမိုဆိုးရွားစေကာ အပူရှိန်ကြောင့်ဖြစ်သည်။
VI ။ အသေးစား မော်တာ၏ axial runout ဖြစ်ရသည့် အခြေခံအကြောင်းရင်းများကား အဘယ်နည်း။
1. ပထမကိစ္စမှာ micro motor ၏ shaft နှင့် rotor ၏ နှိုင်းရရွေ့လျားမှု ၊ rotor core နှင့် shaft တို့သည် အကြောင်းတစ်ခုခုကြောင့် core hole နှင့် micro motor shaft core position clearance ဖြစ်ပါက micro motor rotor core နှင့် shaft အကြား axial နှင့် radial ဆွေမျိုး အနေအထား ပြောင်းလဲခြင်း ၊ axial နှင့် radial နှိုင်းယှဥ်မှု အနေအထား ပြောင်းလဲမှု ရှိပါသည်၊ axial နှင့် radial တို့၏ ရွေ့လျားမှု ကြောင့်သာ axial ၏ ဖြစ်စဉ်ကြောင့် မဟုတ်ဘဲ၊ ဖြစ်နိုင်ခြေ မြင့်မားသော သေးငယ်သော မော်တာအဆုံး အဖုံးနှင့် ရဟတ်အဆုံး ပွတ်တိုက်မှု ပုံပျက်ခြင်း သို့မဟုတ် stator အကွေ့အကောက်များဆီသို့ လှိုင်းလုံးများ ဖြစ်ပေါ်နိုင်သည်။
2. ဒုတိယကိစ္စမှာ micro motor axial adjustment pad ပျက်စီးခြင်း သို့မဟုတ် ယိုစိမ့်ခြင်းဖြစ်သည်၊ ကျွန်ုပ်တို့သည် micro motor ဒီဇိုင်းနှင့် ဖွံ့ဖြိုးတိုးတက်မှုလုပ်ငန်းစဉ်တွင်၊ material thermal expansion factor သည် အဓိကထည့်သွင်းစဉ်းစားထားသောကြောင့် axial တွင် အချို့သောကွာဟချက်ကို ချန်ထားခဲ့မည်ဖြစ်သော်လည်း၊ ၎င်းသည် axial displacement axis ကို တိုက်ရိုက်ဦးတည်လာလိမ့်မည်၊ ထို့ကြောင့် faulty pad ၏ quality ယိုစိမ့်ပါက pad ကိုဖြေရှင်းရန် pad ကိုအသုံးပြုခြင်းသည်၊ ချို့ယွင်းချက်၊ လက်ဆော့ခြင်း
3. တတိယကိစ္စမှာ မိုက်ခရိုမော်တာ stator-rotor သံလိုက်ဗဟိုလိုင်း အလိုအလျောက်ချိန်ညှိမှု ချိန်ညှိခြင်းဖြစ်ပြီး မိုက်ခရိုမော်တာ၏ စံပြအခြေအနေမှာ stator နှင့် ရဟတ်သံလိုက်ဗဟိုလိုင်း လုံးဝထပ်နေသော်လည်း လက်တွေ့တွင် micro motor stator-rotor သည် ပြီးပြည့်စုံသော ထပ်နေသည့် ချိန်ညှိမှုကို ရရှိရန် ပိုမိုခက်ခဲသောကြောင့် လည်ပတ်မှုလုပ်ငန်းစဉ်တွင် micro motor သည် "ချိန်ညှိမှု off-set" - ဤအခြေအနေမှ ထွက်သွားမည်။ အလိုအလျောက် alignment ချိန်ညှိမှုလုပ်ငန်းစဉ်၊ ထို့ကြောင့် ထပ်ခါတလဲလဲ ချိန်ညှိမှုလုပ်ငန်းစဉ်သည် axial runout ပေါ်လာလိမ့်မည်။
4. ၎င်း၏ကိုယ်ပိုင်ပန်ကာဖြင့်လည်ပတ်နေသောမိုက်ခရိုမော်တာနှင့်နှိုင်းယှဉ်ပါက၊ လေဝင်လေထွက်လုပ်ငန်းစဉ်သည် ပန်ကာချိန်ခွင်လျှာအကျိုးသက်ရောက်မှုမကောင်းပါက၊ ၎င်းသည် မိုက်ခရိုမော်တာ၏ axial ရွေ့လျားမှုကိုဖြစ်ပေါ်စေမည့် micro-motor တွင်သက်ဆိုင်ရာ axial force ကိုထုတ်ပေးလိမ့်မည်။
Micro motor axial runout သည် အကျိုးသက်ရောက်မှုကို ထုတ်ပေးလိမ့်မည်လား။
ရိုးရိုးရှင်းရှင်းပြောရလျှင် အသေးစား မော်တာ axial runout သည် သေးငယ်သော မော်တာအား ပုံမှန်မဟုတ်သော တုန်ခါမှု၊ ဆူညံမှု၊ ဝက်ဝံကွဲကျဲမှု၊ မီးလောင်ထားသော အကွေ့အကောက်များ လျော့နည်းစေမည်ဆိုပါက အခြေအနေ၏ ဝန်ဆောင်မှုသက်တမ်းကို လျှော့ချပေးသည်။ သေးငယ်သောမော်တာ၏ axial ရွေ့လျားမှုပြဿနာကိုဖြေရှင်းရန်အတွက် အသေးစားမော်တာ bearing နှင့် end cap nail ၏အပြင်ဘက်အစွန်းရှိ cushion ကိုချိန်ညှိရန် waveform cushion ကိုထည့်နိုင်သည်။
တင်ပြလာတဲ့ ဂြိုလ်လျှော့ချရေးဂီယာအုံ၏ဝက်ဝံများကိုမည်သို့ပြုပြင်မည်နည်း။
စမတ်အိမ်ကဲ့သို့ နယ်ပယ်အမျိုးမျိုးတွင် Planetary reducer configuration motor ကို အသုံးပြုထားပြီး၊ ထို့ကြောင့် micro reducer ၏ bearing ကို မည်သို့ configure လုပ်သနည်း။
ယေဘူယျအားဖြင့် သေးငယ်သောဂြိုလ်ဂီယာဘောက်စ်များသည် အချို့သော axial force ဖြင့် helical ဂီယာများကို အသုံးပြုကြပြီး helical gears နှင့် spur gears များကို double helical gears များကို အသုံးပြုထားလျှင်ပင်၊ axial direction ကို နေရာချထားရပါမည်။ ဂီယာများ၏ meshing force ၏ ပြင်းအားနှင့် ဦးတည်ချက်ကို ဆုံးဖြတ်နိုင်ပြီး၊ bearing ၏ အထွာနှင့် shaft ပေါ်ရှိ force ၏ point of action ကိုသာလျှင် drawing ဖြင့် ဆုံးဖြတ်ရမည်ဖြစ်သည်။ ထို့ကြောင့် အောက်ဖော်ပြပါ အသီးအနှံများကို ရွေးချယ်နိုင်ပါသည်။
1၊ အသုံးများသော ဝက်ဝံများသည် လုံးပတ် ကြိတ်စက် ဝက်ဝံများ၊ တစ်တန်း၊ နှစ်တန်း သွယ်ဆက်ထားသော ဒလိမ့်တုံး ဝက်ဝံများ၊ နှစ်တန်း ဆလင်ဒါ ဒလိမ့်တုံး ဝက်ဝံများ၊ လေးမှတ် အဆက်အသွယ် ဘောလုံး ဝက်ဝံများ၊ ဘောလုံး ဝက်ဝံ စသည်တို့ ဖြစ်သည်။
2၊ ကနဦးရွေးချယ်မှုအတွက် bearing specifications များသည် shaft diameter bearing bore size ကိုဆုံးဖြတ်ရန်ဖြစ်ပြီး input shaft speed ပိုမြင့်သည်၊ ပိုကြီးသော load capacity specifications များတွင်တူညီသော bore ဖြင့်ရွေးချယ်သင့်သည်၊ အလယ်ရှပ်တွင် bearing တွင်လုပ်ဆောင်သော gear meshing force အတွဲနှစ်တွဲပါရှိသည်၊ ပိုကြီးသည်နှင့်အညီ၊ အရွယ်အစားတူညီသော bore ကိုရွေးချယ်သင့်သည်; ပိုကြီးသော load capacity ကိုရွေးချယ်သင့်သည်။
3, output shaft မြန်နှုန်းနိမ့်သည်နှင့် shaft နှင့် bearing တွင်လုပ်ဆောင်သောဂီယာ meshing force တစ်စုံသာ၊ အလတ်စား သို့မဟုတ် သေးငယ်သော bearing ၏ load capacity တွင်တူညီသော bore ကိုရွေးချယ်နိုင်သော်လည်း output shaft နှင့် machine spindle သည် တောင့်တင်းသော connection နှင့် impact ရှိသော load capacity ပိုများသော bearing ကိုရွေးချယ်သင့်သည်။

VIII ဂီယာမော်တာ၏ ဂီယာအုံတွင် ရှပ်ကျိုးရခြင်း၏ အကြောင်းရင်းကား အဘယ်နည်း။
နေ့စဉ်လုပ်ငန်းဆောင်တာများတွင် reducer motor ၏ output အပြင် concentricity သည် မကောင်းသည့်အပြင် ရလဒ် reducer ကျိုးသွားပါက၊ reducer ၏ output shaft ကျိုးပါက အောက်ပါအကြောင်းများထက် မပိုပါ။
ပထမဦးစွာ၊ မှားယွင်းသောရွေးချယ်မှုအမျိုးအစားသည် အားမပြည့်မီသော reducer သို့ ဦးတည်စေသည်။ ရွေးချယ်မှုတွင် အသုံးပြုသူအချို့သည် အလုပ်လိုအပ်ချက်များနှင့် ပြည့်မီရန် ရွေးချယ်ထားသော အလျှော့ပေးသူ၏ အဆင့်သတ်မှတ်ထားသော အထွက် torque သည် မော်တာ၏ အဆင့်သတ်မှတ်ထားသော သွင်းအား ရုန်းအား လျှော့ချမှုအချိုးဖြင့် မြှောက်သောကြောင့်၊ ထုတ်ကုန်နမူနာမှ ပေးဆောင်ထားသော အလားတူ လျှော့ချကိရိယာများ၏ အဆင့်သတ်မှတ်ထားသော အထွက် ရုန်းအားထက် နည်းပါးသည်ဟု လွဲမှားစွာယုံကြည်ကြသည်။
ဒုတိယအချက်အနေဖြင့် ၎င်း၏ drive motor ၏ overload ပမာဏနှင့် အမှန်တကယ်အလုပ်လုပ်နေသော torque ပမာဏကို စဉ်းစားရန် တစ်ချိန်တည်းတွင် လိုအပ်ပါသည်။ အထူးသဖြင့်၊ အချို့သော အခါသမယများသည် reducer အတွင်းရှိ ဂီယာများကို အကာအကွယ်ပေးရုံသာမက၊ အဓိကအားဖြင့် reducer ၏ output shaft ကို လိမ်ထားသော ဤလမ်းညွှန်ချက်ကို တင်းတင်းကျပ်ကျပ် လိုက်နာရမည်ဖြစ်သည်။
တင်ချိန်- နိုဝင်ဘာ ၂၅-၂၀၂၂