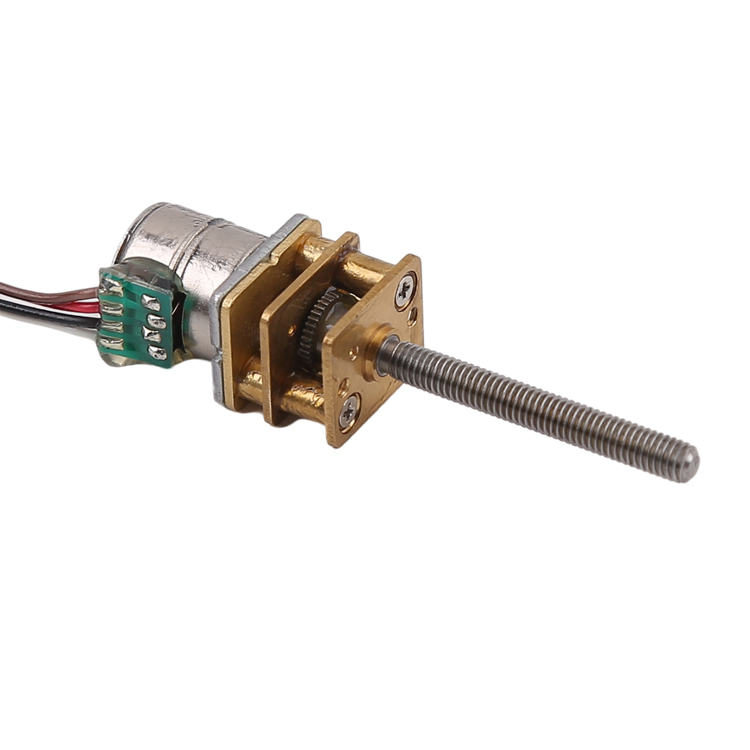
မိုက်ခရိုဂီယာမော်တာမော်တာနှင့် ဂီယာဘောက်စ်တို့ ပါဝင်ပြီး၊ မော်တာသည် ပါဝါအရင်းအမြစ်ဖြစ်ပြီး၊ မော်တာအမြန်နှုန်း အလွန်မြင့်မားကာ၊ torque အလွန်နည်းပါးကာ၊ မော်တာလည်ပတ်မှုကို မော်တာရိုးတံပေါ်တွင်တပ်ဆင်ထားသော မော်တာသွားများ (တီကောင်အပါအဝင်) မှတစ်ဆင့် ဂီယာဘောက်စ်သို့ ပို့လွှတ်သောကြောင့် မော်တာရိုးတံသည် မိုက်ခရိုဂီယာမော်တာတွင် အလွန်အရေးကြီးသော အစိတ်အပိုင်းများထဲမှ တစ်ခုဖြစ်သည်။
I. မော်တာရိုးတံ၏ပစ္စည်း
ရိုးတံပစ္စည်းရွေးချယ်မှုတွင် လိမ်အားအရွယ်အစား၊ စက်ပိုင်းဆိုင်ရာစွမ်းရည်၊ ချေးခံနိုင်ရည်ရှိမှုနှင့် မော်တာလိုအပ်ချက်များအရ သံလိုက်စီးကူးမှုရှိမရှိတို့ကို ထည့်သွင်းစဉ်းစားသင့်ပြီး၊ အရည်အသွေးမြင့် ကာဗွန်သံမဏိ၊ သံမဏိ၊ အလွိုင်းသံမဏိ၊ ကာဗွန်ရိုက်ထားသောသံမဏိ စသည်တို့မှ ပစ္စည်းကို ရွေးချယ်နိုင်သည်။ အသုံးများသော မော်တာရိုးတံပစ္စည်းများမှာ အောက်ပါအတိုင်းဖြစ်သည်။
၁။ အမေရိကန်စံသတ်မှတ်ချက် ၁၁၄၁ နှင့် ၁၁၄၄ သံမဏိ၊ ပြည်တွင်းသုံးပစ္စည်းမှာ လက်ရှိစက်မှုလုပ်ငန်းတွင် အသုံးအများဆုံးပစ္စည်းဖြစ်သည့် အမှတ် ၄၅ သံမဏိဖြစ်သည်။ အဓိကအားနည်းချက်မှာ သံချေးတက်လွယ်သောကြောင့် အသုံးပြုသည့်အခါ သံချေးတက်ခြင်းပြဿနာကို သက်သာစေရန် သံချေးဒဏ်ခံနိုင်သောဆီကို ထပ်မံလိမ်းရန် လိုအပ်ပါသည်။
၂။ အမေရိကန်စံသတ်မှတ်ချက် ၄၁၆ သံမဏိ၊ ပြည်တွင်းပစ္စည်းနှင့် အနီးစပ်ဆုံးမှာ Y1Cr13 ဖြစ်သည်။ ပြုပြင်ရန်မလွယ်ကူပါ၊ ချည်မျှင်ပါသော ရိုးတံခေါင်းကဲ့သို့သော ရှုပ်ထွေးသောအင်္ဂါရပ်များဖြင့် ပြုပြင်ရန်မသင့်တော်ပါ၊ ဈေးနှုန်းသည် ၄၅ သံမဏိထက် ပိုစျေးကြီးပြီး ၃၀၃ ထက် စျေးသက်သာပြီး ပိုမိုကျယ်ပြန့်စွာအသုံးပြုကြသည်။
၃။ အမေရိကန်စံသတ်မှတ်ချက် ၄၂၀ သံမဏိ၊ ပြည်တွင်းပစ္စည်းနှင့် အနီးစပ်ဆုံးမှာ 2Cr13 ဖြစ်သည်။ ပြုပြင်ရန်မလွယ်ကူပါ၊ ချည်ပါသော ရိုးတံခေါင်းကဲ့သို့သော ရှုပ်ထွေးသောအင်္ဂါရပ်များဖြင့် ပြုပြင်ရန်မသင့်တော်ပါ၊ ၄၅ သံမဏိထက် ပိုစျေးကြီးသည်၊ ၄၁၆/၃၀၃ ထက် စျေးသက်သာသည်၊ ပိုမိုကျယ်ပြန့်စွာအသုံးပြုသည်။
၄။ အမေရိကန်စံသတ်မှတ်ချက် ၄၃၁ သံမဏိ၊ ဤပစ္စည်းကို အများအားဖြင့် အသုံးမပြုပါ၊ အဓိကအားဖြင့် အစားအစာနှင့် ထိတွေ့သည့်အခါများတွင် အသုံးပြုပါသည်။ အစားအစာနှင့် ထိတွေ့နိုင်သည်။
၅။ အမေရိကန်စံသတ်မှတ်ချက် ၃၀၃ သံမဏိ၊ ပိုမိုစျေးကြီးသည်၊ ပျော့ပျောင်းသောပစ္စည်းဖြင့် သွင်ပြင်လက္ခဏာရှိပြီး ရှုပ်ထွေးသောပုံသဏ္ဍာန်များအဖြစ် ပြုပြင်ရလွယ်ကူသည်။
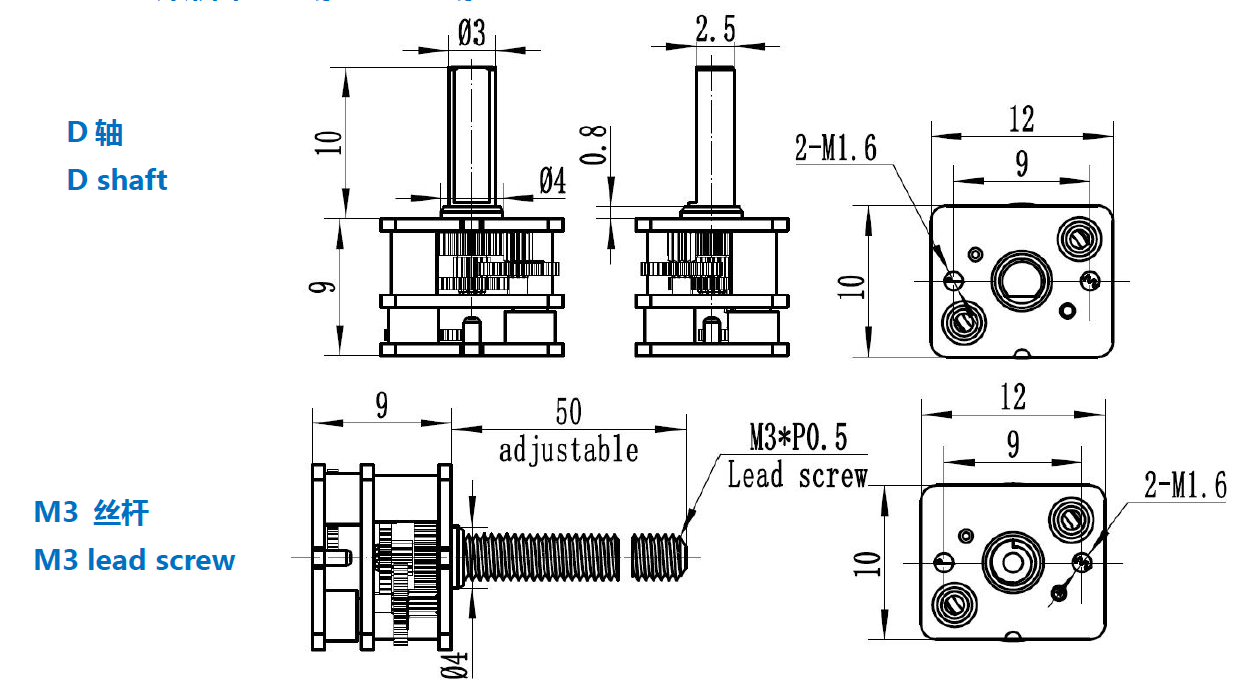
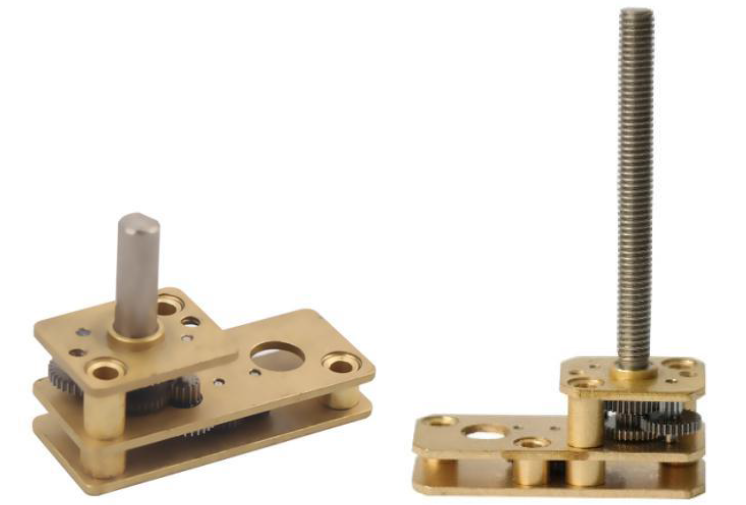
II. မော်တာရိုးတံ၏ပုံသဏ္ဍာန်
မိုက်ခရိုဂီယာမော်တာရှိ မော်တာသွားများနှင့် ဂီယာဘောက်စ်ရှိ ပထမအဆင့်သွားများသည် လည်ပတ်မှုရွေ့လျားမှုကို ထုတ်လွှင့်ရန်ဖြစ်ပြီး ၎င်းသည် မလွဲမသွေ torque ကို ထုတ်လုပ်ပေးမည်ဖြစ်သောကြောင့် မော်တာသွားများနှင့် မော်တာရိုးတံ၏ တပ်ဆင်မှုတင်းကျပ်မှုသည် အလွန်အရေးကြီးပါသည်။ မော်တာသွားများနှင့် မော်တာရိုးတံ တပ်ဆင်မှုကို ထည့်သွင်းစဉ်းစားပါ၊ မော်တာရိုးတံ၏ပုံသဏ္ဍာန်ကို ကျွန်ုပ်တို့ မရရှိနိုင်ပါ။
မော်တာရိုးတံပုံသဏ္ဍာန်များသည်
က. ပေါ့ပါးသောရိုးတံ၊ ဝန်အနည်းငယ်နှင့် torque အနည်းငယ်အတွက် သင့်လျော်သည်။
B. ပြားချပ်ချပ်ရိုးတံ သို့မဟုတ် D-ပုံသဏ္ဍာန်ရိုးတံ၊ အလတ်စားဝန်အတွက် သင့်လျော်သည်။
ဂ။ ခေါက်ထားသောရိုးတံ၊ အလတ်စားဝန်အတွက် သင့်လျော်သည်။
ဃ။ သော့ပေါက်ပါသော ရိုးတံလည်ပတ်ခြင်း၊ လေးလံသောဝန်နှင့် မြင့်မားသော torque အတွက် သင့်လျော်သည်။
E. မော်တာရိုးတံ၏ အထွက်အဆုံးသည် တီကောင်ဖြစ်ပြီး ဤမော်တာရိုးတံအမျိုးအစားသည် အထူးဖြစ်ပြီး အများအားဖြင့် တာဘိုတီကောင်မောင်းနှင်မှုအတွက် အသုံးပြုသည်။
III။ မော်တာဝင်ရိုး၏ လုပ်ငန်းစဉ်လိုအပ်ချက်များ
မိုက်ခရိုဂီယာမော်တာများသက်တမ်းလိုအပ်ချက်များရှိပြီး မော်တာရိုးတံ၏ လုပ်ငန်းစဉ်လိုအပ်ချက်များသည် မိုက်ခရိုဂီယာမော်တာ၏ သက်တမ်းကိုလည်း သက်ရောက်မှုရှိသည်။
မော်တာရိုးတံ၏ လုပ်ဆောင်မှုနည်းပညာရှိသည်။
က. မော်တာရိုးတံအချင်းအရွယ်အစား တိကျမှုသည် အတော်လေးမြင့်မားပြီး 0.002 မီလီမီတာအတွင်း ရရှိနိုင်သည်။
ခ။ သံချေးတက်ခြင်းကို ကာကွယ်ရန်နှင့် ချေးခံနိုင်ရည်ကို မြှင့်တင်ရန်အတွက် မော်တာဝင်ရိုး၏ မျက်နှာပြင်ကို နီကယ်ဖြင့် လျှပ်စစ်ဖြင့် ಲೇಪನ್ಯಾನುವಿಸထားလေ့ရှိသည်။
ဂ။ မော်တာဝင်ရိုး၏ မျက်နှာပြင်ကြမ်းတမ်းမှုသည်လည်း အလွန်အရေးကြီးပြီး ၎င်းသည် မော်တာသွားများနှင့် ကိုက်ညီမှု၏ တိကျမှုကို တိုက်ရိုက်အကျိုးသက်ရောက်စေသည်။
IV. မြန်နှုန်းလျှော့ချသည့် ဒရိုက်ရိုးတံ အမျိုးအစားခွဲခြားခြင်း
ပါဝါအလိုက် ပါဝါမြင့် ပါဝါလျှော့စက်နှင့် ပါဝါနည်း ပါဝါလျှော့စက်ဟူ၍ ခွဲခြားထားသည်။ ပါဝါ၊ မော်ဒယ်နှင့် သတ်မှတ်ချက်အမျိုးမျိုးရှိသော output shaft သည်လည်း မတူညီပါ။ reducer ၏ transmission shaft ကို output shaft နှင့် input shaft အဖြစ် ခွဲခြားထားပြီး shaft နှစ်မျိုး၏ နိယာမကို အောက်တွင် အသေးစိတ် မိတ်ဆက်ပေးထားပါသည်။
၁။ အထွက်ရိုးတံ
Output shaft သည် reducer နှင့် transmission mechanism နှင့် ချိတ်ဆက်ထားသော shaft ဖြစ်ပြီး output shaft ၏ output speed သည် အလွန်နှေးကွေးပြီး ပစ္စည်းပေါ်မူတည်၍ output shaft ကို သတ္တု output shaft၊ ပလတ်စတစ် output shaft အဖြစ် ခွဲခြားထားသည်။ ပုံသဏ္ဍာန်အလိုက် စိတ်ကြိုက်ပြင်ဆင်နိုင်သော D-shaped shaft၊ အဝိုင်း shaft၊ နှစ်ထပ်ပြားချပ် shaft၊ ဆဋ္ဌဂံ shaft၊ ပဉ္စဂံ shaft၊ စတုရန်း shaft စသည်တို့အဖြစ် ခွဲခြားထားသည်။
၂။ ထည့်သွင်းရိုးတံ
အဝင်ရိုးတံသည် ဂီယာမော်တာနှင့် ရီကွီတာတို့၏ ချိတ်ဆက်ထားသော ဂီယာရိုးတံဖြစ်ပြီး အဝင်ရိုးတံ၏ အဝင်အမြန်နှုန်းနှင့် torque သည် သေးငယ်ပြီး ရိုးတံအချင်းရှိသည်။ အဝင်ရိုးတံ၏ တစ်ဖက်စွန်းသည် တပ်ဆင်အပေါက်မှတစ်ဆင့် တပ်ဆင်သည့်အခေါင်းပေါက်ထဲသို့ ထည့်သွင်းနိုင်သည်၊ အဝင်ရိုးတံသည် တပ်ဆင်အခွံရှိ ဂီယာနှင့် ပေါင်းစပ်နိုင်ပြီး အဝင်ရိုးတံ၏ အခြားတစ်ဖက်စွန်းတွင် တပ်ဆင်အပေါက်ကို ဖွင့်ပြီးနောက် ရီကွီတာမော်တာ၏ မော်တာရိုးတံကို တပ်ဆင်အပေါက်တွင် ထည့်သွင်းပြီး ပြားချပ်သော သော့ကို ပြားချပ်သော သော့အပေါက်နှင့် မော်တာရိုးတံကြားတွင် ထည့်သွင်းခြင်းဖြင့် မော်တာရိုးတံနှင့် အဝင်ရိုးတံကြားတွင် မြန်ဆန်တည်ငြိမ်သော ချိတ်ဆက်မှုကို ရရှိသည်။ အထက်ဖော်ပြပါ အဝင်ရိုးတံ၊ တပ်ဆင်အခြေ၊ တပ်ဆင်အပေါက်နှင့် ပြားချပ်သော သော့အပေါက်တို့အကြား ပူးပေါင်းဆောင်ရွက်မှုမှတစ်ဆင့် ဂီယာမော်တာကို မော်တာရိုးတံမှတစ်ဆင့် အဝင်ရိုးတံနှင့် လျင်မြန်စွာ ချိတ်ဆက်နိုင်ပြီး ဂီယာမော်တာကို တပ်ဆင်အိမ်ရာဖြင့် အမြန်တပ်ဆင်နိုင်စေပြီး ဝန်ထမ်းများ၏ တင်ဆောင်ခြင်းနှင့် ချခြင်းများကို ပိုမိုအဆင်ပြေစေသည်။
၃။ လျှော့ချရေး၏ဂီယာရိုး၏အခန်းကဏ္ဍနှင့်ကွာခြားချက်။
က။ တစ်စုံတစ်ရာသော အာဏာပမာဏကို လွှဲပြောင်းပေးသည်။
B. အဝင်အမြန်နှုန်းလည်ပတ်မှု၊ အထွက်အမြန်နှုန်းနိမ့်လည်ပတ်မှု၊ အရှိန်လျှော့ခြင်းရည်ရွယ်ချက်အောင်မြင်ရန်။ ပွတ်တိုက်မှုခုခံမှုကိုလျစ်လျူရှုခြင်း၏အခြေခံမူတွင်၊ အဝင်ဝင်ရိုးနှင့် အထွက်ဝင်ရိုးတို့သည် ညီမျှသောပါဝါကိုလွှဲပြောင်းပေးပြီး ပါဝါ = torque * speed၊ ဆိုလိုသည်မှာ ပါဝါတူညီသောအခါ၊ torque နှင့် speed သည် အဝင်ဝင်ရိုးအမြန်နှုန်းဖြစ်သောကြောင့် torque သည်သေးငယ်ပြီး shaft အချင်းသာသေးငယ်သည်။ ဆန့်ကျင်ဘက်အားဖြင့်၊ အထွက်ဝင်ရိုးအမြန်နှုန်းနိမ့်သောကြောင့် torque သည်ကြီးမားသောကြောင့် shaft အချင်းပိုကြီးသောကိုအသုံးပြုရမည်။
V. အသေးစားဂီယာမော်တာ၏ ဝက်ဝံများအပူပေးရသည့် အကြောင်းရင်းများကား အဘယ်နည်း။
မိုက်ခရိုဂီယာမော်တာပုံမှန်လည်ပတ်မှုတွင်၊ bearing သည် ပုံမှန်မဟုတ်သောအပူပေးမှုမပေါ်ပါ၊ မိုက်ခရိုဂီယာမော်တာ bearing သည် အပူပေးမှုပြင်းထန်ခြင်းတွင် အောက်ပါအကြောင်းပြချက်များရှိလေ့ရှိသည်။
၁။ အသေးစားလျှော့ချမော်တာ bearing ပျက်စီးပြီးနောက်မော်တာ bearing အပူလွန်ကဲစေလိမ့်မည်။
၂။ ဘက်ရင်ပေါ်ရှိ ပုံမှန်မဟုတ်သော အမှုန်အမွှားများ သို့မဟုတ် ပြင်ပအရာဝတ္ထုများနှင့် ရောနှောနေသော ချောဆီသည် ဘက်ရင်ပွန်းစားမှုကို အပူလွန်ကဲစေပါသည်။
၃။ အသေးစား လျှော့ချမော်တာ ဝက်ဝံဆီ ပြတ်လပ်မှု၊ မော်တာသည် ဤအခြေအနေတွင် ကြာရှည်စွာရှိနေပါက ပွတ်တိုက်မှု တိုးလာပြီး ဝက်ဝံအပူလွန်ကဲခြင်းကို ဖြစ်စေသည်။
၄။ ချောဆီအရည်အသွေး အလွန်ညံ့ဖျင်းခြင်း၊ viscosity မလုံလောက်ခြင်း သို့မဟုတ် viscosity အလွန်မြင့်မားခြင်းတို့ကြောင့် bearing ၏ ပုံမှန်မဟုတ်သော အပူပေးမှုကို ဖြစ်ပေါ်စေပါသည်။
၅။ သေးငယ်သော reducer bearing နှင့် output shaft၊ အဆုံးအဖုံးသည် လျော့ရဲလွန်းခြင်း သို့မဟုတ် တင်းကျပ်လွန်းပါက၊ တင်းကြပ်လွန်းခြင်းသည် bearing ပုံပျက်ခြင်းကို ဖြစ်ပေါ်စေပြီး လျော့ရဲလွန်းခြင်းသည် offset ကို ဖြစ်ပေါ်စေပြီး bearing အပူကို ပြင်းထန်စေပါသည်။
၆။ ဝက်ဝံများ၏ မသင့်လျော်သော တပ်ဆင်မှု သို့မဟုတ် ဝက်ဝံ၏ အပြင်ဘက်လက်စွပ်သည် ဖြောင့်တန်းမနေစေရန် ဝက်ဝံ၏ အပြင်ဘက်လက်စွပ် မညီမျှမှု၊ ထို့နောက် ဝက်ဝံသည် အာရုံခံနိုင်စွမ်းမရှိ၊ ဝန်အား ပိုမိုဆိုးရွားလာပြီး အပူတက်လိမ့်မည်။
VI. မီနီယာမော်တာ၏ axial runout ၏ အခြေခံအကြောင်းရင်းများကား အဘယ်နည်း။
၁။ ပထမအခြေအနေမှာ မိုက်ခရိုမော်တာ၊ ရိုတာအူတိုင်နှင့် ရိုးတံတို့၏ ရိုးတံနှင့် ရိုတာတို့၏ ဆွေမျိုးရွေ့လျားမှုဖြစ်ပြီး၊ အူတိုင်အပေါက်နှင့် မိုက်ခရိုမော်တာရိုးတံအူတိုင်နေရာ အကွာအဝေးသည် မိုက်ခရိုမော်တာရိုတာအူတိုင်နှင့် ရိုးတံ၏ ဝင်ရိုးနှင့် ရေဒီယယ် ဆွေမျိုးအနေအထားကြားသို့ ဦးတည်စေပါက၊ ရိုးတံကို ကျူးကျော်ဝင်ရောက်မှုဖြစ်စဉ်တစ်ခု ဖြစ်ပေါ်လာပြီး၊ ရိုတာအူတိုင်၏ ဝင်ရိုးရွေ့လျားမှုကြောင့် မော်တာအဖျားအဖုံးငယ်နှင့် ရိုတာအဆုံးပွတ်တိုက်မှုပုံပျက်ခြင်း သို့မဟုတ် stator winding သို့ လှိုင်းထခြင်းတို့ကို ဖြစ်ပေါ်စေနိုင်ခြေ မြင့်မားပါသည်။
၂။ ဒုတိယအခြေအနေမှာ မိုက်ခရိုမော်တာ axial adjustment pad ပျက်စီးခြင်း သို့မဟုတ် ယိုစိမ့်ခြင်းဖြစ်ပြီး၊ မိုက်ခရိုမော်တာဒီဇိုင်းနှင့် ဖွံ့ဖြိုးတိုးတက်ရေးလုပ်ငန်းစဉ်တွင်၊ ပစ္စည်း၏ အပူချဲ့ထွင်မှုအချက်များသည် အဓိကထည့်သွင်းစဉ်းစားရမည့်အချက်များဖြစ်သောကြောင့်၊ axial တွင် ကွာဟချက်တစ်ခုကျန်ခဲ့မည်ဖြစ်သော်လည်း၊ ၎င်းသည် axial displacement ကို တိုက်ရိုက်ပြောင်းလဲစေသောကြောင့်၊ pad ကို load လုပ်သည့်နည်းလမ်းကို အသုံးပြုခြင်းဖြင့်၊ pad ယိုစိမ့်ခြင်း သို့မဟုတ် pad ၏ အရည်အသွေးချို့ယွင်းပါက axial brake ချို့ယွင်းခြင်း၊ shaft ကို ပြောင်းလဲစေခြင်းတို့ ဖြစ်ပေါ်နိုင်သည်။
၃။ တတိယအခြေအနေမှာ မိုက်ခရိုမော်တာ stator-rotor သံလိုက်ဗဟိုလိုင်း အလိုအလျောက် ချိန်ညှိမှုကြောင့် ချို့ယွင်းမှုများ ဖြစ်ပေါ်ပြီး၊ မိုက်ခရိုမော်တာ၏ အကောင်းဆုံးအခြေအနေမှာ stator နှင့် rotor သံလိုက်ဗဟိုလိုင်း လုံးဝထပ်နေခြင်းဖြစ်သော်လည်း၊ လက်တွေ့တွင် မိုက်ခရိုမော်တာ stator-rotor သည် အပြည့်အဝ ထပ်နေခြင်းကို ချိန်ညှိရန် ပိုမိုခက်ခဲသောကြောင့်၊ လည်ပတ်မှုလုပ်ငန်းစဉ်တွင် မိုက်ခရိုမော်တာသည် ဤအခြေအနေမှ လွတ်မြောက်သွားလိမ့်မည်- "alignment - offset - alignment - offset Offset ------" ထို့ကြောင့် အလိုအလျောက် ချိန်ညှိမှုလုပ်ငန်းစဉ်၊ ထို့ကြောင့် ထပ်ခါတလဲလဲ ချိန်ညှိမှုလုပ်ငန်းစဉ်သည် axial runout ပေါ်လာလိမ့်မည်။
၄။ ၎င်း၏ကိုယ်ပိုင်ပန်ကာလည်ပတ်နေသော မိုက်ခရိုမော်တာနှင့် နှိုင်းယှဉ်ပါက၊ လေဝင်လေထွက်လုပ်ငန်းစဉ်သည် မိုက်ခရိုမော်တာပေါ်တွင် သက်ဆိုင်ရာ ဝင်ရိုးအားကို ထုတ်ပေးမည်ဖြစ်ပြီး၊ ပန်ကာဟန်ချက်ညီမှုအာနိသင် မကောင်းပါက၊ ၎င်းသည် မိုက်ခရိုမော်တာ၏ ဝင်ရိုးရွေ့လျားမှုကိုလည်း ဖြစ်ပေါ်စေမည်ဖြစ်သည်။
မိုက်ခရိုမော်တာ axial runout က သက်ရောက်မှုကို ဖြစ်ပေါ်စေမှာလား။
ရိုးရိုးလေးပြောရရင် အသေးစားမော်တာရဲ့ ဝင်ရိုးလည်ပတ်မှု နှေးကွေးသွားရင် အသေးစားမော်တာရဲ့ ပုံမှန်မဟုတ်တဲ့ တုန်ခါမှု၊ ဆူညံသံ၊ bearing ပြန့်ကျဲမှု၊ လောင်ကျွမ်းမှုဖြစ်စေပြီး ဝန်ဆောင်မှုသက်တမ်းကို လျော့ကျစေပါတယ်။ အသေးစားမော်တာရဲ့ bearing ရဲ့ အပြင်ဘက်အစွန်းမှာရှိတဲ့ cushion ကို ချိန်ညှိဖို့ waveform cushion ကို ထည့်သွင်းနိုင်ပြီး အသေးစားမော်တာရဲ့ ဝင်ရိုးရွေ့လျားမှုပြဿနာကို ဖြေရှင်းပေးနိုင်ပါတယ်။
VII. ဂြိုဟ်လျှော့ချရေးဂီယာဘောက်စ်၏ ဝက်ဝံများကို မည်သို့စီစဉ်ရမည်နည်း။
ဂြိုဟ်လျှော့ချမှုပုံစံမော်တာကို smart home ကဲ့သို့သောနယ်ပယ်အမျိုးမျိုးတွင်အသုံးပြုခဲ့သည်၊ ထို့ကြောင့် micro reducer ၏ bearing ကိုမည်သို့ configure လုပ်သနည်း။
ယေဘုယျအားဖြင့် မိုက်ခရိုဂြိုဟ်ဂီယာဘောက်စ်များသည် axial force ရှိသည့် helical gear များကို အသုံးပြုကြပြီး double helical gear များနှင့် spur gear များကို အသုံးပြုသော်လည်း axial direction ကို နေရာချထားရမည်။ ဂီယာများ၏ meshing force ၏ ပမာဏနှင့် direction ကို ဆုံးဖြတ်နိုင်ပြီး bearing ၏ span နှင့် shaft ပေါ်ရှိ force ၏ action point ကိုသာ drawing ဖြင့် ဆုံးဖြတ်ရမည်။ ထို့ကြောင့် အောက်ပါ bearing ရွေးချယ်မှုကို ပြုလုပ်နိုင်သည်။
၁။ အသုံးများသော ဝက်ဝံများမှာ လုံးဝိုင်းရိုလာဝက်ဝံများ၊ တစ်တန်း၊ နှစ်တန်း ඇලල් ...
၂။ ကနဦးရွေးချယ်မှုအတွက် bearing သတ်မှတ်ချက်များမှာ shaft အချင်း bearing bore အရွယ်အစားကို ဆုံးဖြတ်ရန်ဖြစ်ပြီး၊ input shaft speed မြင့်မားပါက၊ load capacity သတ်မှတ်ချက်ကြီးများတွင် bore တူညီသော bore ကို ရွေးချယ်သင့်ပြီး၊ အလယ် shaft တွင် bearing ပေါ်တွင် gear meshing force နှစ်ခုပါရှိပြီး၊ bearing အရွယ်အစားကြီးသည်နှင့်အညီ၊ load capacity သတ်မှတ်ချက်ကြီးများတွင် bore တူညီသော bore ကို ရွေးချယ်သင့်သည်။
၃။ အထွက်ရိုးတံ၏ အမြန်နှုန်းသည် နိမ့်ပြီး ရိုးတံနှင့် ဝက်ဝံပေါ်တွင် သက်ရောက်မှုရှိသော ဂီယာပေါင်းစပ်အား တစ်စုံသာရှိသောကြောင့် အလတ်စား သို့မဟုတ် သေးငယ်သော ဝက်ဝံများ၏ ဝန်ထုပ်ဝန်ပိုးတွင် တူညီသော အပေါက်ကို ရွေးချယ်နိုင်သော်လည်း အထွက်ရိုးတံနှင့် စက်၏ တင်းကျပ်သော ချိတ်ဆက်မှုနှင့် သက်ရောက်မှုအတွက် ဝန်ထုပ်ဝန်ပိုး ပိုမိုများပြားသော ဝက်ဝံကို ရွေးချယ်သင့်သည်။

VIII။ ဂီယာမော်တာ၏ ဂီယာဘောက်စ်တွင် ရိုးတံကျိုးခြင်း၏ အကြောင်းရင်းကား အဘယ်နည်း။
နေ့စဉ်လုပ်ငန်းဆောင်တာတွင် reducer မော်တာတပ်ဆင်မှု၏ output ၏ အာရုံစူးစိုက်မှုကောင်းမွန်ခြင်းမရှိသည့်အပြင်၊ ရလဒ်အနေဖြင့် reducer shaft ကျိုးသွားပါက reducer ၏ output shaft ကျိုးသွားပါက အောက်ပါအကြောင်းပြချက်များထက် မပိုပါ။
ပထမဦးစွာ၊ မှားယွင်းသောအမျိုးအစားရွေးချယ်မှုကြောင့် reducer သည် အားမလုံလောက်ပါ။ ရွေးချယ်မှုတွင်အသုံးပြုသူအချို့က ရွေးချယ်ထားသော reducer ၏ rated output torque သည် အလုပ်လိုအပ်ချက်များနှင့်ကိုက်ညီသရွေ့၊ အမှန်တကယ်တွင် ၎င်းသည်မကိုက်ညီဟု မှားယွင်းစွာယုံကြည်ကြသည်၊ အဘယ်ကြောင့်ဆိုသော် မော်တာ၏ rated output torque ကို reduction ratio နှင့်မြှောက်လိုက်သောအခါ၊ ထုတ်ကုန်နမူနာများမှပေးသော အလားတူ reducer များ၏ rated output torque ထက် မူအရ ခါးပတ်၏တန်ဖိုးသည် နည်းပါသည်။
ဒုတိယအချက်အနေနဲ့ တစ်ချိန်တည်းမှာပဲ ၎င်းရဲ့ drive motor ရဲ့ overload capacity နဲ့ လိုအပ်တဲ့ working torque ပမာဏကို ထည့်သွင်းစဉ်းစားရပါမယ်။ အထူးသဖြင့် အချို့သောအခြေအနေတွေမှာ reducer ထဲက gear တွေကို ကာကွယ်ရုံသာမက reducer ရဲ့ output shaft ကိုပါ လိမ်ဖြတ်ထားဖို့ ဒီလမ်းညွှန်ချက်ကို တိတိကျကျလိုက်နာရပါမယ်။
ပို့စ်တင်ချိန်: ၂၀၂၂ ခုနှစ်၊ နိုဝင်ဘာလ ၂၅ ရက်