Stepper motor သည် လျှပ်စစ်စွမ်းအင်ကို စက်စွမ်းအင်အဖြစ်သို့ ပြောင်းလဲပေးသည့် လျှပ်စစ်မော်တာဖြစ်ပြီး ၎င်း၏အထွက် torque နှင့် speed ကို power supply ကိုထိန်းချုပ်ခြင်းဖြင့် တိကျစွာထိန်းချုပ်နိုင်သည်။
Stepper motor ၏ အားသာချက်များ
မြင့်မားသောတိကျမှု
stepper မော်တာ၏လည်ပတ်မှုထောင့်သည် input pulses အရေအတွက်နှင့်အချိုးကျသည်၊ ထို့ကြောင့်မော်တာ၏အနေအထားနှင့်အမြန်နှုန်းကိုတိကျစွာထိန်းချုပ်မှုရရှိရန်ပဲမျိုးစုံအရေအတွက်နှင့်ကြိမ်နှုန်းကိုတိကျစွာထိန်းချုပ်ရန်ဖြစ်နိုင်သည်။ ဤဝိသေသလက္ခဏာသည် CNC စက်ကိရိယာများ၊ ပုံနှိပ်စက်များနှင့် အထည်အလိပ်စက်များကဲ့သို့ တိကျမှုမြင့်မားသောနေရာချထားမှုလိုအပ်သော အပလီကေးရှင်းများတွင် stepper motor များကို ထူးချွန်စေသည်။
Stepper မော်တာများသည် ခြေလှမ်းတစ်လှမ်းလျှင် 3% နှင့် 5% အကြား တိကျမှုရှိပြီး ယခင်အဆင့်မှ နောက်တစ်ဆင့်သို့ အမှားအယွင်းများကို စုဆောင်းမထားပါ၊ ဆိုလိုသည်မှာ ၎င်းတို့သည် တိုးပွားလာသောအမှားများကို မထုတ်ပေးပါ။ ဆိုလိုသည်မှာ stepper motor များသည် မြင့်မားသော positional တိကျမှုနှင့် motion repeatability ကို အချိန်ကြာမြင့်စွာ သို့မဟုတ် ဆက်တိုက် ရွေ့လျားမှုကို ထိန်းသိမ်းထားနိုင်သည်ဟု ဆိုလိုသည်။
အလွန်ထိန်းချုပ်နိုင်သည်။

Stepper မော်တာလည်ပတ်မှုကို pulse current ကိုထိန်းချုပ်ခြင်းဖြင့်အောင်မြင်သည်၊ ထို့ကြောင့် software programming မှတဆင့်မော်တာ၏ထိန်းချုပ်မှုကိုနားလည်နိုင်သည်။ ဤ programmability သည် stepper motor များကို အလိုအလျောက် ထုတ်လုပ်မှုလိုင်းများ၊ စက်ရုပ်များနှင့် အခြားနယ်ပယ်များကဲ့သို့သော အသုံးချပရိုဂရမ်များစွာ၏ လိုအပ်ချက်များကို ဖြည့်ဆည်းပေးနိုင်သည်။
stepper motor ၏တုန့်ပြန်မှုကို input pulse ဖြင့်သာဆုံးဖြတ်သောကြောင့်၊ open-loop control ကိုအသုံးပြုနိုင်ပြီး၊ ၎င်းသည် motor ၏ဖွဲ့စည်းပုံကိုပိုမိုရိုးရှင်းပြီးထိန်းချုပ်ရန်စျေးပိုသက်သာစေသည်။ Open-loop ထိန်းချုပ်မှုသည်လည်း စနစ်ရှုပ်ထွေးမှုနှင့် ပြုပြင်ထိန်းသိမ်းမှုကုန်ကျစရိတ်များကို လျှော့ချပေးသည်။
အနိမ့်အမြန်နှုန်းမှာ မြင့်မားသော torque
Stepper မော်တာများသည် နိမ့်သောအမြန်နှုန်းတွင် မြင့်မားသော torque output ပါရှိပြီး ၎င်းတို့ကို အလိုအလျောက်တံဆိပ်ကပ်သည့်စက်များနှင့် ထုပ်ပိုးသည့်စက်များကဲ့သို့သော အနိမ့်အမြန်နှုန်းနှင့် မြင့်မားသော torque လိုအပ်သော application များတွင် အထူးကောင်းမွန်စေသည်။
Stepper မော်တာများသည် ရပ်လိုက်သည့်အခါ အမြင့်ဆုံး torque ရှိသည်၊ အနေအထားအရ တည်ငြိမ်မှု သို့မဟုတ် ပြင်ပဝန်များကို ခံနိုင်ရည်လိုအပ်သည့် အပလီကေးရှင်းများတွင် ၎င်းတို့အား အားသာချက်ဖြစ်စေသည့် အင်္ဂါရပ်တစ်ခုဖြစ်သည်။
မြင့်မားသောယုံကြည်စိတ်ချရမှု

Stepper မော်တာများတွင် စုတ်တံများမပါရှိသဖြင့် စုတ်တံများ ဝတ်ဆင်ခြင်းကြောင့် ချို့ယွင်းချက်များနှင့် ဆူညံသံများကို လျှော့ချပေးသည်။ ၎င်းသည် မော်တာများ၏ သက်တမ်းသည် ဝက်ဝံများ၏ သက်တမ်းအပေါ်တွင် များစွာမူတည်သဖြင့် stepper motor များကို အလွန်ယုံကြည်စိတ်ချရစေသည်။
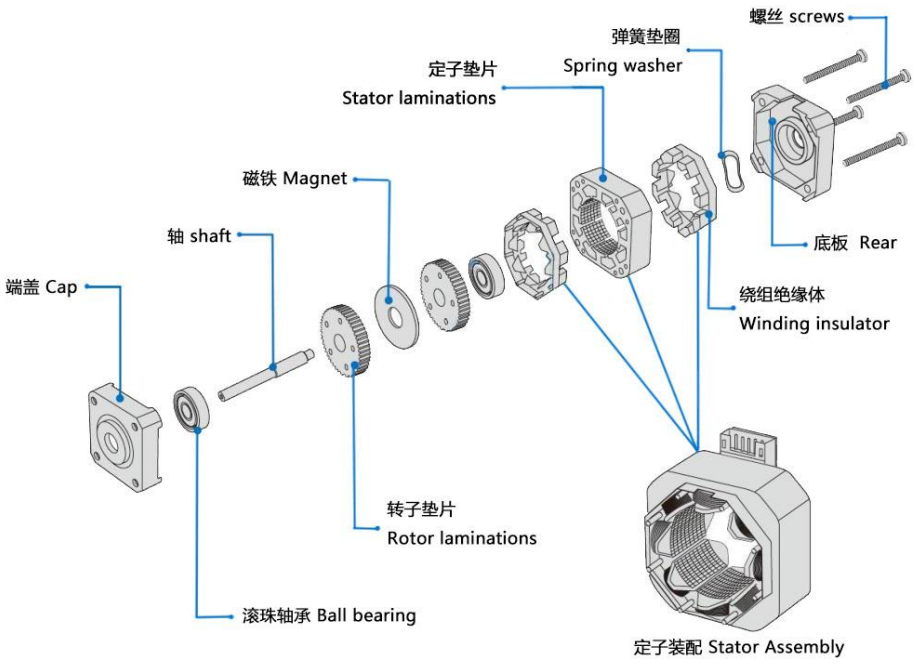
Stepper မော်တာများတွင် အစိတ်အပိုင်းသုံးပိုင်းပါဝင်သည်- မော်တာကိုယ်တိုင်၊ ယာဉ်မောင်းနှင့် Controller ပါ၀င်ပြီး တပ်ဆင်ခြင်းနှင့် ထိန်းသိမ်းမှုအတော်လေးလွယ်ကူစေသည်။
ကျယ်ပြန့်သောမြန်နှုန်းအကွာအဝေး

Stepper မော်တာများသည် အတော်လေးမြန်သော အမြန်နှုန်းအကွာအဝေးရှိပြီး သွေးခုန်နှုန်းကို ချိန်ညှိခြင်းဖြင့် မော်တာ၏အမြန်နှုန်းကို ပြောင်းလဲနိုင်သည်။ ၎င်းသည် stepper motor ကို မတူညီသော အလုပ်အမြန်နှုန်းများနှင့် load လိုအပ်ချက်များနှင့် လိုက်လျောညီထွေဖြစ်အောင် လုပ်ဆောင်နိုင်စေပါသည်။
ကောင်းသော Start-Stop နှင့် Reverse Response
Stepper မော်တာများသည် စတင်ချိန်နှင့် ရပ်နေချိန်တွင် အချက်ပြမှုများကို ထိန်းချုပ်ရန် လျင်မြန်စွာတုံ့ပြန်ပြီး နောက်ပြန်ဆုတ်သည့်အခါ တိကျမှုနှင့် တည်ငြိမ်မှုကို ထိန်းသိမ်းထားသည်။ ဤအင်္ဂါရပ်သည် မကြာခဏ စတင်-ရပ်တန့်ရန်နှင့် အပလီကေးရှင်း၏ ပြောင်းပြန်လှန်မှုအတွက် လိုအပ်သော stepper motor ကို အားသာချက်တစ်ခု ဖြစ်စေသည်။
II၊ stepper မော်တာများ၏အားနည်းချက်များ
ခြေတစ်လှမ်း ပျက်ရန် လွယ်ကူသည်။
ကောင်းစွာမထိန်းချုပ်ပါက၊ stepper မော်တာများသည် အဆင့်လွန် သို့မဟုတ် အဆင့်လွန်သွားနိုင်သည်။ Out-step ဆိုသည်မှာ မော်တာသည် ကြိုတင်သတ်မှတ်ထားသော ခြေလှမ်းအရေအတွက်နှင့်အညီ လှည့်ရန်ပျက်ကွက်ခြင်းဖြစ်ပြီး၊ ခြေလှမ်းပြင်ပမှ မော်တာသည် ကြိုတင်သတ်မှတ်ထားသော ခြေလှမ်းအရေအတွက်ထက် ပိုမိုလှည့်ပတ်နေခြင်းဖြစ်သည်။ ဤဖြစ်စဉ်နှစ်ခုစလုံးသည် မော်တာ၏ တည်နေရာတိကျမှုကို ဆုံးရှုံးစေပြီး စနစ်၏စွမ်းဆောင်ရည်ကို ထိခိုက်စေပါသည်။
အဆင့်လွန်ခြင်းနှင့် အဆင့်လွန်ခြင်းများ၏ မျိုးဆက်သည် မော်တာ၏ဝန်၊ လှည့်နှုန်းနှင့် ထိန်းချုပ်အချက်ပြမှု၏ ကြိမ်နှုန်းနှင့် လွှဲခွင်ကဲ့သို့သော အကြောင်းရင်းများနှင့် ဆက်စပ်နေသည်။ ထို့ကြောင့်၊ stepper မော်တာများကိုအသုံးပြုသည့်အခါ၊ ခြေလှမ်းလွန်ပြီး ခြေလှမ်းလွန်သွားခြင်းတို့ကို ရှောင်ရှားရန် ဤအချက်များအား ဂရုတစိုက်ထည့်သွင်းစဉ်းစားပြီး သင့်လျော်သောအစီအမံများကို လုပ်ဆောင်ရန် လိုအပ်ပါသည်။
မြင့်မားသော လည်ပတ်နှုန်းသို့ ရောက်ရှိရန် ခက်ခဲခြင်း။
stepper motor ၏လည်ပတ်မှုအမြန်နှုန်းကို ၎င်း၏လည်ပတ်မှုမူအရ ကန့်သတ်ထားပြီး မြင့်မားသော rotational speed ကိုရရှိရန် ခက်ခဲသည်။ ထိန်းချုပ်အချက်ပြမှု၏ ကြိမ်နှုန်းကို တိုးမြှင့်ခြင်းဖြင့် မော်တာ၏အမြန်နှုန်းကို မြှင့်တင်နိုင်သော်လည်း ကြိမ်နှုန်းမြင့်မားလွန်းပါက မော်တာ အပူပေးခြင်း၊ ဆူညံသံများ တိုးလာကာ မော်တာကိုပင် ပျက်စီးစေနိုင်သည်။
ထို့ကြောင့်၊ stepper မော်တာများကိုအသုံးပြုသောအခါ၊ လျှောက်လွှာလိုအပ်ချက်များနှင့်အညီသင့်လျော်သောအမြန်နှုန်းကိုရွေးချယ်ရန်လိုအပ်ပြီးအချိန်ကြာမြင့်စွာအရှိန်ပြင်းစွာမောင်းနှင်ခြင်းကိုရှောင်ရှားရန်လိုအပ်သည်။
အပြောင်းအလဲများကို တင်ရန် အထိမခံပါ။
Stepping motor များသည် အနေအထားနှင့် အမြန်နှုန်းကို တိကျစွာ ထိန်းချုပ်နိုင်စေရန် လည်ပတ်နေစဉ်အတွင်း လက်ရှိ ပဲမျိုးစုံ အရေအတွက်နှင့် ကြိမ်နှုန်းတို့ကို အချိန်နှင့်တပြေးညီ ထိန်းချုပ်ရန် လိုအပ်ပါသည်။ သို့သော် ကြီးမားသောဝန်ပြောင်းလဲမှုများတွင်၊ ထိန်းချုပ်မှုလက်ရှိသွေးခုန်နှုန်းကို နှောင့်ယှက်မည်ဖြစ်ပြီး မတည်မငြိမ် ရွေ့လျားမှုနှင့် မထိန်းချုပ်နိုင်သော ခြေလှမ်းများကိုပင် ဖြစ်ပေါ်စေပါသည်။
ဤပြဿနာကိုဖြေရှင်းရန်၊ မော်တာ၏တည်နေရာနှင့်အမြန်နှုန်းကိုစောင့်ကြည့်ရန်နှင့်အမှန်တကယ်အခြေအနေအရထိန်းချုပ်မှုအချက်ပြမှုကိုချိန်ညှိရန်အပိတ်ကွင်းထိန်းချုပ်မှုစနစ်ကိုအသုံးပြုနိုင်သည်။ သို့သော်၊ ၎င်းသည် စနစ်၏ ရှုပ်ထွေးမှုနှင့် ကုန်ကျစရိတ်ကို တိုးစေမည်ဖြစ်သည်။
စွမ်းဆောင်ရည်နိမ့်
Stepper မော်တာများသည် အဆက်မပြတ်ရပ်တန့်ခြင်းနှင့် စတင်ခြင်းကြားတွင် ထိန်းချုပ်ထားသောကြောင့် ၎င်းတို့၏စွမ်းဆောင်ရည်သည် အခြားမော်တာအမျိုးအစားများ (ဥပမာ DC မော်တာများ၊ AC မော်တာများ) နှင့် နှိုင်းယှဉ်ပါက အတော်လေးနည်းပါးပါသည်။ ဆိုလိုသည်မှာ stepper motor များသည် တူညီသော output power အတွက် ပါဝါပို၍ စားသုံးပါသည်။
Stepper မော်တာများ၏ စွမ်းဆောင်ရည်ကို မြှင့်တင်ရန်အတွက် ထိန်းချုပ်မှု အယ်လဂိုရီသမ်များကို ပိုမိုကောင်းမွန်အောင်ပြုလုပ်ခြင်းနှင့် မော်တာဆုံးရှုံးမှုများကို လျှော့ချခြင်းကဲ့သို့သော အစီအမံများကို အသုံးပြုနိုင်သည်။ သို့သော်လည်း ဤအစီအမံများကို အကောင်အထည်ဖော်ရာတွင် နည်းပညာနှင့် ကုန်ကျစရိတ် ရင်းနှီးမြှုပ်နှံမှု အဆင့်တစ်ခု လိုအပ်ပါသည်။
III၊ stepper မော်တာများ၏အသုံးချမှုနယ်ပယ်၊
Stepper motor များကို ၎င်းတို့၏ ထူးခြားသော အားသာချက်များနှင့် အချို့သော ကန့်သတ်ချက်များကြောင့် နယ်ပယ်များစွာတွင် တွင်ကျယ်စွာ အသုံးပြုကြသည်။ အောက်ပါတို့သည် stepper မော်တာများ၏အသုံးချမှုနယ်ပယ်၏အသေးစိတ်ဆွေးနွေးချက်ဖြစ်သည်။
စက်ရုပ်နှင့် အလိုအလျောက်စနစ်များ
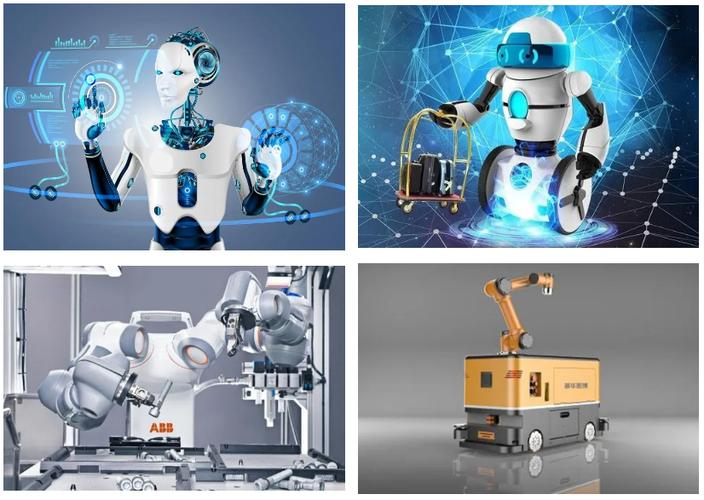
Stepper မော်တာများကို စက်မှုစက်ရုပ်များ၊ အလိုအလျောက် ထုတ်လုပ်မှုလိုင်းများနှင့် အခြားနယ်ပယ်များတွင် တွင်ကျယ်စွာ အသုံးပြုကြသည်။ ၎င်းတို့သည် စက်ရုပ်များ၏ ရွေ့လျားမှုအမြန်နှုန်းနှင့် ဦးတည်ချက်ကို တိကျစွာ ထိန်းချုပ်နိုင်ပြီး အလိုအလျောက် ထုတ်လုပ်မှု လုပ်ငန်းစဉ်များတွင် တိကျသော မြင့်မားသော နေရာချထားမှုနှင့် လျင်မြန်သော တုံ့ပြန်မှုများကို သိရှိနိုင်သည်။
CNC စက်ကိရိယာများ

ပုံနှိပ်စက်များ

Stepper motor များကို inkjet နှင့် laser printer ကဲ့သို့သော စက်များတွင် print head ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ရန် အသုံးပြုပါသည်။ မော်တာ၏ ရွေ့လျားမှုကို တိကျစွာ ထိန်းချုပ်ခြင်းဖြင့် အရည်အသွေးမြင့် စာသားနှင့် ရုပ်ပုံပုံနှိပ်ခြင်းကို သိရှိနိုင်သည်။ ဤအင်္ဂါရပ်သည် ပုံနှိပ်စက်များတွင် stepper motor များကို တွင်ကျယ်စွာ အသုံးပြုစေသည်။
ဆေးဘက်ဆိုင်ရာကိရိယာများ

Stepper motor များကို ဆေးဘက်ဆိုင်ရာ ပုံရိပ်ဖော်ကိရိယာများ (ဥပမာ X-ray စက်များ၊ CT စကင်နာများ စသည်ဖြင့်) စကင်ဖတ်စစ်ဆေးခြင်းဘောင်၏ ရွေ့လျားမှုကို မောင်းနှင်ရန် အသုံးပြုပါသည်။ မော်တာ၏ ရွေ့လျားမှုကို တိကျစွာ ထိန်းချုပ်ခြင်းဖြင့် လူနာ၏ မြန်ဆန်တိကျသော ပုံရိပ်ကို သိရှိနိုင်သည်။ ဤအင်္ဂါရပ်သည် ဆေးဘက်ဆိုင်ရာပစ္စည်းကိရိယာများတွင် stepper motor များအရေးပါသောအခန်းကဏ္ဍမှပါဝင်စေသည်။
အာကာသယာဉ်

Stepper မော်တာများကို ဂြိုလ်တုသဘောထားထိန်းချုပ်မှုနှင့် ဒုံးပျံတွန်းကန်စနစ်များကဲ့သို့သော အာကာသကိရိယာများတွင် actuator များ၏ရွေ့လျားမှုကို ထိန်းချုပ်ရန်အတွက် အသုံးပြုသည်။ Stepper မော်တာများသည် မြင့်မားသောတိကျမှုနှင့် တည်ငြိမ်မှုမြင့်မားသောလိုအပ်ချက်များအောက်တွင် ကောင်းမွန်သောစွမ်းဆောင်ရည်ကိုပြသသည်။ ဤသွင်ပြင်လက္ခဏာသည် stepper motor များကို aerospace field ၏အရေးကြီးသောအစိတ်အပိုင်းတစ်ခုဖြစ်စေသည်။
ဖျော်ဖြေရေး နှင့် ဂိမ်းကစားသည့် စက်ပစ္စည်း

Stepper မော်တာများကို လေဆာ ကမ္ပည်းထိုးခြင်း၊ 3D ပရင်တာများနှင့် ဂိမ်းထိန်းချုပ်ကိရိယာများကဲ့သို့သော စက်ပစ္စည်းများတွင် actuator များ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ရန် အသုံးပြုပါသည်။ ဤစက်ပစ္စည်းများတွင်၊ အဆင့်မြင့်မော်တာများ၏ တိကျသောထိန်းချုပ်မှုသည် အရည်အသွေးမြင့်ထုတ်ကုန်တစ်ခုနှင့် ကြီးစွာသောအသုံးပြုသူအတွေ့အကြုံကိုရရှိရန် အရေးကြီးပါသည်။
ပညာရေးနှင့်သုတေသန

ဓာတ်ခွဲခန်းတူရိယာများနှင့် သင်ထောက်ကူပစ္စည်းများကဲ့သို့သော အခြေအနေများတွင် စမ်းသပ်ပလပ်ဖောင်းများ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ရန်အတွက် Stepper မော်တာများကို အသုံးပြုပါသည်။ ပညာရေးတွင်၊ stepper motor များ၏ ကုန်ကျစရိတ်နည်းပြီး တိကျမှုမြင့်မားခြင်းသည် ၎င်းတို့အား စံပြသင်ကြားရေးကိရိယာများဖြစ်စေသည်။ Stepper မော်တာများ၏ တိကျသောထိန်းချုပ်မှုဝိသေသလက္ခဏာများကို အသုံးပြုခြင်းဖြင့်၊ ၎င်းတို့သည် ကျောင်းသားများအား ရူပဗေဒနှင့် အင်ဂျင်နီယာဆိုင်ရာမူများကို ပိုမိုနားလည်ရန် ကူညီပေးနိုင်ပါသည်။
အချုပ်အားဖြင့်ဆိုရသော် stepper motor များသည် မြင့်မားသောတိကျမှု၊ ထိန်းချုပ်နိုင်မှု၊ အမြန်နှုန်းနိမ့်မှုနှင့် မြင့်မားသော torque နှင့် မြင့်မားသောယုံကြည်စိတ်ချရမှုတို့ရှိသော်လည်း ၎င်းတို့သည် ခြေလှမ်းပြင်ပသို့ လွယ်ကူစွာထွက်ခြင်း၏ အားနည်းချက်များ၊ မြင့်မားသောလည်ပတ်နှုန်းများရရှိရန် ခက်ခဲသည်၊ ဝန်အပြောင်းအလဲများကို အထိမခံနိုင်သော၊ နှင့် ထိရောက်မှုနည်းသောအားနည်းချက်များလည်းရှိသည်။ Stepper မော်တာများကိုရွေးချယ်သည့်အခါ၊ စနစ်၏စွမ်းဆောင်ရည်နှင့်တည်ငြိမ်မှုကိုသေချာစေရန် application လိုအပ်ချက်များနှင့်အညီ၎င်းတို့၏အားသာချက်များနှင့်အားနည်းချက်များကိုထည့်သွင်းစဉ်းစားရန်လိုအပ်သည်။
တင်ချိန်- နိုဝင်ဘာ ၁၄-၂၀၂၄