stepper motor ဆိုသည်မှာ လျှပ်စစ်စွမ်းအင်ကို စက်မှုစွမ်းအင်အဖြစ် ပြောင်းလဲပေးသော လျှပ်စစ်မော်တာတစ်ခုဖြစ်ပြီး ၎င်း၏ output torque နှင့် speed ကို power supply ကို ထိန်းချုပ်ခြင်းဖြင့် တိကျစွာ ထိန်းချုပ်နိုင်သည်။
ကျွန်တော်/ကျွန်မ၊ stepper motor ရဲ့ အားသာချက်တွေကတော့
မြင့်မားသောတိကျမှု
stepper မော်တာ၏ လည်ပတ်ထောင့်သည် input pulses အရေအတွက်နှင့် အချိုးကျသောကြောင့် မော်တာ၏ အနေအထားနှင့် အမြန်နှုန်းကို တိကျစွာ ထိန်းချုပ်နိုင်ရန် pulses အရေအတွက်နှင့် ကြိမ်နှုန်းကို တိကျစွာ ထိန်းချုပ်နိုင်သည်။ ဤဝိသေသလက္ခဏာသည် stepper မော်တာများကို CNC စက်ကိရိယာများ၊ ပုံနှိပ်စက်များနှင့် အထည်အလိပ်စက်များကဲ့သို့သော မြင့်မားသောတိကျမှုရှိသော နေရာချထားမှု လိုအပ်သည့် အသုံးချမှုများတွင် ထူးချွန်စေသည်။
Stepper မော်တာများသည် တစ်ဆင့်လျှင် ၃% မှ ၅% အကြား တိကျမှုရှိပြီး ယခင်အဆင့်မှ နောက်တစ်ဆင့်သို့ အမှားအယွင်းများ မစုပုံစေပါ၊ ဆိုလိုသည်မှာ ၎င်းတို့သည် စုပေါင်းအမှားအယွင်းများ မဖြစ်ပေါ်စေပါ။ ဆိုလိုသည်မှာ stepper မော်တာများသည် မြင့်မားသော အနေအထားတိကျမှုနှင့် ရှည်လျားသောကာလများ သို့မဟုတ် စဉ်ဆက်မပြတ်ရွေ့လျားမှုတွင် ရွေ့လျားမှုထပ်ခါတလဲလဲလုပ်ဆောင်နိုင်စွမ်းကို ထိန်းသိမ်းထားနိုင်သည်။
အလွန်ထိန်းချုပ်နိုင်သော

Stepper မော်တာလည်ပတ်မှုကို pulse current ကိုထိန်းချုပ်ခြင်းဖြင့် ရရှိသောကြောင့် မော်တာထိန်းချုပ်မှုကို software programming မှတစ်ဆင့် လုပ်ဆောင်နိုင်သည်။ ဤ programmability သည် stepper မော်တာများအား automated production lines၊ robotics နှင့် အခြားနယ်ပယ်များကဲ့သို့သော application အမျိုးမျိုး၏ လိုအပ်ချက်များကို ဖြည့်ဆည်းပေးနိုင်စေပါသည်။
stepper motor ရဲ့ response ကို input pulse နဲ့ပဲ ဆုံးဖြတ်တဲ့အတွက် open-loop control ကို အသုံးပြုနိုင်ပြီး မော်တာရဲ့ဖွဲ့စည်းပုံကို ပိုရိုးရှင်းစေပြီး ထိန်းချုပ်ရတာ ကုန်ကျစရိတ်လည်း သက်သာပါတယ်။ Open-loop control က system complexity နဲ့ maintenance cost တွေကိုလည်း လျှော့ချပေးပါတယ်။
အမြန်နှုန်းနိမ့်များတွင် torque မြင့်မားခြင်း
Stepper မော်တာများသည် အမြန်နှုန်းနိမ့်တွင် torque output မြင့်မားသောကြောင့် အလိုအလျောက် တံဆိပ်ကပ်စက်များနှင့် ထုပ်ပိုးစက်များကဲ့သို့ အမြန်နှုန်းနိမ့်နှင့် torque မြင့်မားရန် လိုအပ်သည့် အသုံးချမှုများတွင် အလွန်ကောင်းမွန်ပါသည်။
Stepper မော်တာများသည် ရပ်တန့်သွားသောအခါ အမြင့်ဆုံး torque ရှိပြီး၊ ၎င်းသည် အနေအထားတည်ငြိမ်မှု သို့မဟုတ် ပြင်ပဝန်များကို ခံနိုင်ရည်ရှိရန် လိုအပ်သည့် အသုံးချမှုများတွင် အကျိုးရှိစေသည်။
ယုံကြည်စိတ်ချရမှုမြင့်မားခြင်း

Stepper မော်တာများတွင် ဘရက်ရှ်များ မပါဝင်သောကြောင့် ဘရက်ရှ်များ ယိုယွင်းပျက်စီးမှုကြောင့် ဖြစ်ပေါ်လာသော ချို့ယွင်းမှုများနှင့် ဆူညံသံများကို လျှော့ချပေးပါသည်။ ထို့ကြောင့် stepper မော်တာများကို အလွန်ယုံကြည်စိတ်ချရပြီး မော်တာ၏ သက်တမ်းသည် ဘယ်ရင်များ၏ သက်တမ်းပေါ်တွင် များစွာမူတည်ပါသည်။
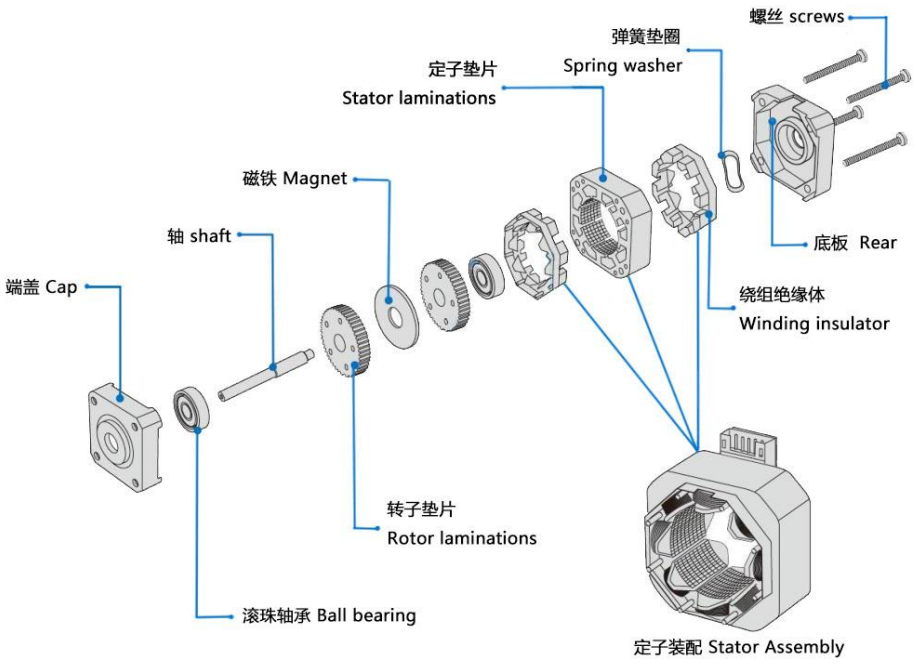
Stepper မော်တာများတွင် ရိုးရှင်းသောဖွဲ့စည်းပုံရှိပြီး အစိတ်အပိုင်းသုံးပိုင်းပါဝင်သည်- မော်တာ၊ ဒရိုက်ဘာနှင့် ထိန်းချုပ်ကိရိယာတို့ဖြစ်ပြီး တပ်ဆင်ခြင်းနှင့် ပြုပြင်ထိန်းသိမ်းခြင်းကို နှိုင်းယှဉ်ရလွယ်ကူစေသည်။
မြန်နှုန်းအကွာအဝေးကျယ်ပြန့်

Stepper မော်တာများသည် မြန်နှုန်းအပိုင်းအခြားအားဖြင့် အတော်လေးမြန်ဆန်ပြီး pulse frequency ကို ချိန်ညှိခြင်းဖြင့် မော်တာ၏မြန်နှုန်းကို ပြောင်းလဲနိုင်သည်။ ၎င်းသည် stepper မော်တာအား မတူညီသော အလုပ်လုပ်နှုန်းများနှင့် ဝန်လိုအပ်ချက်များနှင့် လိုက်လျောညီထွေဖြစ်အောင် ပြုလုပ်နိုင်စေပါသည်။
ကောင်းမွန်သော စတင်-ရပ်တန့်မှုနှင့် ပြောင်းပြန်တုံ့ပြန်မှု
Stepper မော်တာများသည် စတင်လည်ပတ်ချိန်နှင့် ရပ်တန့်ချိန်တွင် ထိန်းချုပ်မှုအချက်ပြမှုများကို လျင်မြန်စွာ တုံ့ပြန်ပြီး နောက်ပြန်လှည့်သည့်အခါ မြင့်မားသောတိကျမှုနှင့် တည်ငြိမ်မှုကို ထိန်းသိမ်းထားသည်။ ဤအင်္ဂါရပ်သည် stepper မော်တာအား မကြာခဏ စတင်လည်ပတ်ရန်နှင့် ပြောင်းပြန်လှည့်ရန် လိုအပ်စေပြီး အသုံးချမှု၏ အားသာချက်ရှိသည်။
II၊ stepper မော်တာများ၏ အားနည်းချက်များ
ခြေလှမ်းတွေ လွတ်သွားလွယ်တယ် ဒါမှမဟုတ် ခြေလှမ်းလွန်သွားလွယ်တယ်
ကောင်းစွာမထိန်းချုပ်ပါက စတက်ပါမော်တာများသည် အဆင့်လွန်ခြင်း သို့မဟုတ် အဆင့်လွန်ခြင်းဖြစ်နိုင်သည်။ အဆင့်လွန်ခြင်းဆိုသည်မှာ မော်တာသည် ကြိုတင်သတ်မှတ်ထားသော အဆင့်အရေအတွက်နှင့်အညီ လည်ပတ်ရန်ပျက်ကွက်ခြင်းကို ဆိုလိုပြီး အဆင့်လွန်ခြင်းဆိုသည်မှာ မော်တာသည် ကြိုတင်သတ်မှတ်ထားသော အဆင့်အရေအတွက်ထက်ပို၍ လည်ပတ်ခြင်းကို ဆိုလိုသည်။ ဤဖြစ်စဉ်နှစ်ခုစလုံးသည် မော်တာ၏ အနေအထားတိကျမှုဆုံးရှုံးစေပြီး စနစ်၏စွမ်းဆောင်ရည်ကို ထိခိုက်စေပါသည်။
အဆင့်လွန်ခြင်းနှင့် အဆင့်လွန်ခြင်း ဖြစ်ပေါ်ခြင်းသည် မော်တာ၏ ဝန်၊ လည်ပတ်မှုအမြန်နှုန်းနှင့် ထိန်းချုပ်အချက်ပြမှု၏ ကြိမ်နှုန်းနှင့် amplitude ကဲ့သို့သော အချက်များနှင့် ဆက်စပ်နေသည်။ ထို့ကြောင့်၊ stepper မော်တာများကို အသုံးပြုသည့်အခါ၊ ဤအချက်များကို ဂရုတစိုက်ထည့်သွင်းစဉ်းစားရန်နှင့် အဆင့်လွန်ခြင်းနှင့် အဆင့်လွန်ခြင်း မဖြစ်ပွားစေရန် သင့်လျော်သော အစီအမံများ ချမှတ်ရန် လိုအပ်ပါသည်။
မြင့်မားသောလည်ပတ်မှုအမြန်နှုန်းသို့ရောက်ရှိရန်ခက်ခဲခြင်း
stepper မော်တာ၏ လည်ပတ်မှုအမြန်နှုန်းကို ၎င်း၏လည်ပတ်မှုနိယာမဖြင့် ကန့်သတ်ထားပြီး မြင့်မားသောလည်ပတ်မှုအမြန်နှုန်းကို ရရှိရန် များသောအားဖြင့် ခက်ခဲပါသည်။ ထိန်းချုပ်မှုအချက်ပြမှု၏ ကြိမ်နှုန်းကို တိုးမြှင့်ခြင်းဖြင့် မော်တာ၏အမြန်နှုန်းကို မြှင့်တင်နိုင်သော်လည်း၊ ကြိမ်နှုန်းမြင့်မားလွန်းခြင်းသည် မော်တာအပူပေးခြင်း၊ ဆူညံသံတိုးလာခြင်းကဲ့သို့သော ပြဿနာများဆီသို့ ဦးတည်စေပြီး မော်တာကိုပင် ပျက်စီးစေနိုင်သည်။
ထို့ကြောင့် stepper motor များကိုအသုံးပြုသည့်အခါ အသုံးချမှုလိုအပ်ချက်များအရ သင့်လျော်သော မြန်နှုန်းအပိုင်းအခြားကို ရွေးချယ်ရန်နှင့် မြင့်မားသောအမြန်နှုန်းဖြင့် အချိန်ကြာမြင့်စွာ လည်ပတ်ခြင်းကို ရှောင်ကြဉ်ရန် လိုအပ်ပါသည်။
ဝန်အားပြောင်းလဲမှုများအပေါ် အာရုံခံနိုင်စွမ်းရှိသည်
Stepping မော်တာများသည် အနေအထားနှင့် အမြန်နှုန်းကို တိကျစွာ ထိန်းချုပ်နိုင်စေရန်အတွက် လည်ပတ်နေစဉ်အတွင်း လျှပ်စီးကြောင်း pulse အရေအတွက်နှင့် ကြိမ်နှုန်းကို အချိန်နှင့်တပြေးညီ ထိန်းချုပ်ရန် လိုအပ်သည်။ သို့သော် ဝန်အား အပြောင်းအလဲများပါက ထိန်းချုပ်လျှပ်စီးကြောင်း pulse ကို အနှောင့်အယှက်ဖြစ်စေပြီး မတည်ငြိမ်သော ရွေ့လျားမှုနှင့် မထိန်းချုပ်နိုင်သော ခြေလှမ်းများကိုပင် ဖြစ်ပေါ်စေနိုင်သည်။
ဤပြဿနာကိုဖြေရှင်းရန်အတွက် မော်တာ၏ အနေအထားနှင့် အမြန်နှုန်းကို စောင့်ကြည့်ရန်နှင့် တကယ့်အခြေအနေအရ ထိန်းချုပ်မှုအချက်ပြမှုကို ချိန်ညှိရန်အတွက် closed-loop control system ကို အသုံးပြုနိုင်ပါသည်။ သို့သော် ၎င်းသည် စနစ်၏ ရှုပ်ထွေးမှုနှင့် ကုန်ကျစရိတ်ကို တိုးမြင့်စေပါသည်။
ထိရောက်မှုနည်းသည်
စတက်ပါမော်တာများကို အဆက်မပြတ်ရပ်တန့်ခြင်းနှင့် စတင်ခြင်းကြားတွင် ထိန်းချုပ်ထားသောကြောင့် ၎င်းတို့၏ စွမ်းဆောင်ရည်သည် အခြားမော်တာအမျိုးအစားများ (ဥပမာ DC မော်တာများ၊ AC မော်တာများ စသည်) နှင့် နှိုင်းယှဉ်ပါက အတော်လေးနိမ့်သည်။ ဆိုလိုသည်မှာ စတက်ပါမော်တာများသည် တူညီသောအထွက်ပါဝါအတွက် ပါဝါပိုမိုသုံးစွဲသည်။
stepper မော်တာများ၏ စွမ်းဆောင်ရည်ကို မြှင့်တင်ရန်အတွက် ထိန်းချုပ်မှု အယ်လဂိုရီသမ်များကို အကောင်းဆုံးဖြစ်အောင် ပြုလုပ်ခြင်းနှင့် မော်တာဆုံးရှုံးမှုများကို လျှော့ချခြင်းကဲ့သို့သော အစီအမံများကို အသုံးပြုနိုင်ပါသည်။ သို့သော် ဤအစီအမံများကို အကောင်အထည်ဖော်ရန်အတွက် နည်းပညာအဆင့်တစ်ခုနှင့် ကုန်ကျစရိတ်ရင်းနှီးမြှုပ်နှံမှု လိုအပ်ပါသည်။
III၊ stepper မော်တာများ၏ အသုံးချမှုအတိုင်းအတာ-
Stepper မော်တာများကို ၎င်းတို့၏ထူးခြားသော အားသာချက်များနှင့် အချို့သောကန့်သတ်ချက်များကြောင့် နယ်ပယ်များစွာတွင် တွင်ကျယ်စွာအသုံးပြုကြသည်။ Stepper မော်တာများ၏ အသုံးချမှုအတိုင်းအတာအကြောင်း အသေးစိတ်ဆွေးနွေးချက်မှာ အောက်ပါအတိုင်းဖြစ်သည်။
ရိုဘော့တစ်နှင့် အလိုအလျောက်စနစ်များ
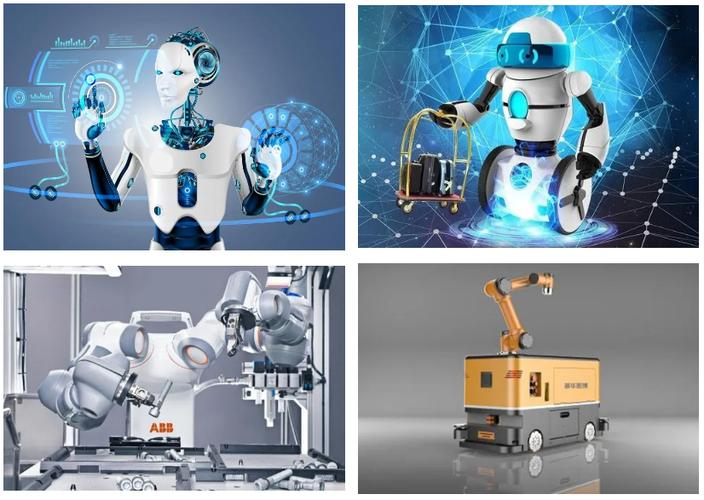
Stepper မော်တာများကို စက်မှုလုပ်ငန်းသုံး စက်ရုပ်များ၊ အလိုအလျောက် ထုတ်လုပ်မှုလိုင်းများနှင့် အခြားနယ်ပယ်များတွင် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုကြသည်။ ၎င်းတို့သည် စက်ရုပ်များ၏ ရွေ့လျားမှုအမြန်နှုန်းနှင့် ဦးတည်ရာကို တိကျစွာ ထိန်းချုပ်နိုင်ပြီး အလိုအလျောက် ထုတ်လုပ်မှုလုပ်ငန်းစဉ်များတွင် မြင့်မားသော တိကျသော နေရာချထားမှုနှင့် မြန်ဆန်သော တုံ့ပြန်မှုကို ဖော်ဆောင်နိုင်သည်။
CNC စက်ကိရိယာများ

ပရင်တာများ

Stepper မော်တာများကို inkjet နှင့် laser printer များကဲ့သို့သော စက်ပစ္စည်းများတွင် print head ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ရန် အသုံးပြုသည်။ မော်တာ၏ ရွေ့လျားမှုကို တိကျစွာ ထိန်းချုပ်ခြင်းဖြင့် အရည်အသွေးမြင့် စာသားနှင့် ရုပ်ပုံပုံနှိပ်ခြင်းကို လုပ်ဆောင်နိုင်သည်။ ဤအင်္ဂါရပ်သည် stepper မော်တာများကို ပုံနှိပ်စက်ပစ္စည်းများတွင် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုစေသည်။
ဆေးဘက်ဆိုင်ရာကိရိယာများ

စတက်ပါမော်တာများကို ဆေးဘက်ဆိုင်ရာ ရုပ်ပုံဖော်ကိရိယာများ (ဥပမာ X-ray စက်များ၊ CT စကင်နာများ စသည်) တွင် စကင်န်ဖတ်ဘောင်၏ ရွေ့လျားမှုကို မောင်းနှင်ရန်အတွက် အသုံးပြုသည်။ မော်တာ၏ ရွေ့လျားမှုကို တိကျစွာ ထိန်းချုပ်ခြင်းဖြင့် လူနာ၏ မြန်ဆန်တိကျသော ရုပ်ပုံဖော်မှုကို ရရှိနိုင်သည်။ ဤအင်္ဂါရပ်သည် စတက်ပါမော်တာများသည် ဆေးဘက်ဆိုင်ရာ ပစ္စည်းကိရိယာများတွင် အရေးကြီးသော အခန်းကဏ္ဍမှ ပါဝင်စေသည်။
အာကာသယာဉ်

Stepper မော်တာများကို ဂြိုလ်တု သဘောထားထိန်းချုပ်မှုနှင့် ဒုံးပျံ တွန်းကန်စနစ်များကဲ့သို့သော အာကာသယာဉ်ကိရိယာများတွင် actuator များ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ရန် အသုံးပြုသည်။ Stepper မော်တာများသည် မြင့်မားသော တိကျမှုနှင့် မြင့်မားသော တည်ငြိမ်မှု လိုအပ်ချက်များအောက်တွင် ကောင်းမွန်သော စွမ်းဆောင်ရည်ကို ပြသသည်။ ဤဝိသေသလက္ခဏာသည် stepper မော်တာများကို အာကာသယာဉ်ကွင်း၏ အရေးကြီးသော အစိတ်အပိုင်းတစ်ခု ဖြစ်စေသည်။
ဖျော်ဖြေရေးနှင့် ဂိမ်းကစားခြင်းဆိုင်ရာ ပစ္စည်းကိရိယာများ

Stepper မော်တာများကို လေဆာထွင်းစက်များ၊ 3D ပရင်တာများနှင့် ဂိမ်းထိန်းချုပ်ကိရိယာများကဲ့သို့သော စက်ပစ္စည်းများရှိ actuator များ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ရန် အသုံးပြုပါသည်။ ဤစက်ပစ္စည်းများတွင်၊ stepper မော်တာများကို တိကျစွာထိန်းချုပ်ခြင်းသည် အရည်အသွေးမြင့်ထုတ်ကုန်နှင့် ကောင်းမွန်သောအသုံးပြုသူအတွေ့အကြုံကို ရရှိရန် အလွန်အရေးကြီးပါသည်။
ပညာရေးနှင့် သုတေသန

Stepper မော်တာများကို ဓာတ်ခွဲခန်းတူရိယာများနှင့် သင်ကြားရေးပစ္စည်းများကဲ့သို့သော အခြေအနေများတွင် စမ်းသပ်ပလက်ဖောင်းများ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ရန် အသုံးပြုပါသည်။ ပညာရေးတွင်၊ stepper မော်တာများ၏ ကုန်ကျစရိတ်နည်းပါးခြင်းနှင့် တိကျမှုမြင့်မားခြင်းတို့ကြောင့် ၎င်းတို့သည် စံပြသင်ကြားရေးကိရိယာများဖြစ်လာသည်။ stepper မော်တာများ၏ တိကျသောထိန်းချုပ်မှုဝိသေသလက္ခဏာများကို အသုံးပြုခြင်းဖြင့် ကျောင်းသားများသည် ရူပဗေဒနှင့် အင်ဂျင်နီယာမူများကို ပိုမိုနားလည်ရန် ကူညီပေးနိုင်ပါသည်။
အကျဉ်းချုပ်အားဖြင့်၊ stepper မော်တာများသည် မြင့်မားသောတိကျမှု၊ ထိန်းချုပ်နိုင်မှု၊ အမြန်နှုန်းနိမ့်ခြင်းနှင့် torque မြင့်မားခြင်း၊ ယုံကြည်စိတ်ချရမှုမြင့်မားခြင်းစသည့် အားသာချက်များရှိသည်၊ သို့သော် ၎င်းတို့တွင် အလွယ်တကူ step မှ လွဲချော်ခြင်း သို့မဟုတ် step မှ လွဲချော်ခြင်း၊ မြင့်မားသောလည်ပတ်မှုအမြန်နှုန်းကိုရရှိရန်ခက်ခဲခြင်း၊ ဝန်ပြောင်းလဲမှုများကို အာရုံခံနိုင်စွမ်းနှင့် ထိရောက်မှုနည်းပါးခြင်းစသည့် အားနည်းချက်များလည်းရှိသည်။ stepper မော်တာများကို ရွေးချယ်သောအခါ၊ စနစ်၏စွမ်းဆောင်ရည်နှင့် တည်ငြိမ်မှုကိုသေချာစေရန် အသုံးချမှုလိုအပ်ချက်များအရ ၎င်းတို့၏ အားသာချက်များနှင့် အားနည်းချက်များအပြင် အသုံးချမှုအတိုင်းအတာကို ထည့်သွင်းစဉ်းစားရန် လိုအပ်ပါသည်။
ပို့စ်တင်ချိန်: ၂၀၂၄ ခုနှစ်၊ နိုဝင်ဘာလ ၁၄ ရက်